

Miniaturized real-time stereoscopic visual display
A stereoscopic and miniature technology, applied in the field of machine vision, can solve the problems of small field of view, large blind spot of stereoscopic field, and increase the computational burden of the system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
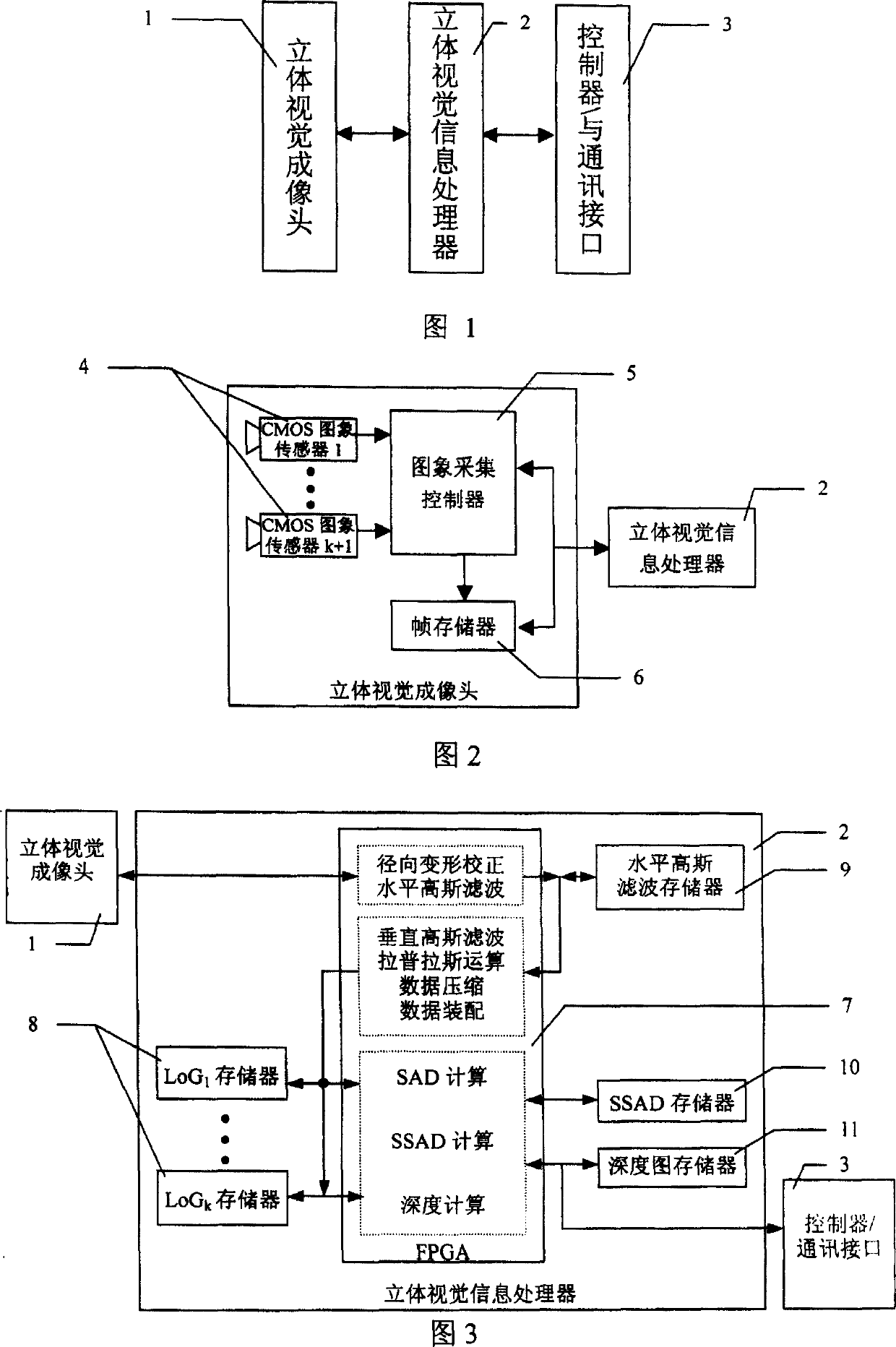
[0033] The present invention mainly includes three parts of a stereo vision imaging head (1), a stereo vision information processor (2), and a controller / communication interface (3), as shown in FIG. 1 . The stereo vision information processor (2) reads the synchronous image acquired by the stereo vision imaging head (1), and sends the dense depth map recovered in real time to the controller / communication interface (3).
[0034] The stereo vision imaging head includes 2-8 CMOS image sensors (4), an image acquisition controller (5) and a frame memory (6). The diagonal field angle of the camera equipped with the image sensor (4) is selected between 30 and 140 degrees. The image sensor (4) can also be a CCD image sensor. The CCD image sensor has a large dynamic range, good stability and high imaging quality, but the cost is high. The function of the image acquisition controller (5) is to control all image sensors (4) to acquire images synchronously, and store the images in the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More