Novel sensorless robot collision detection method and novel sensorless robot collision detection system
A technology of collision detection and robotics, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems that affect judgment efficiency and action efficiency, unfavorable promotion and application, and complex calculations, and achieve good application value, universality, Computationally Efficient Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The technical solutions of the present invention will be described in detail below with reference to the accompanying drawings, but the protection scope of the present invention is not limited to the embodiments.
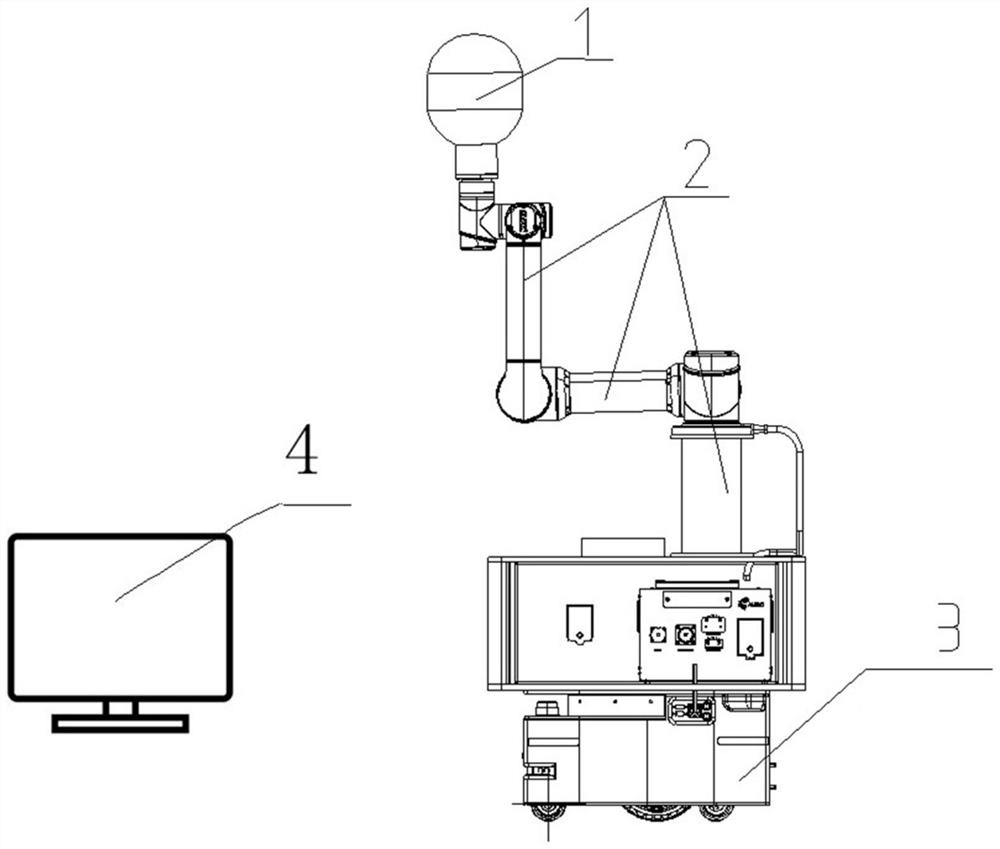
[0036] Such as figure 1 The new sensorless robot collision detection system shown mainly includes: a host computer 4 and a robot. The host computer stores a PC terminal operation program. Collision detection hardware system. Collision detection part 2 is the key detection area for collisions. Collisions in this area will be detected more sensitively. The moving part 1 to be tested is the position where the robot mainly provides functional services. For example, a robot that provides headform testing function services, the The functional service of the headform test is mainly completed by the moving parts under test.
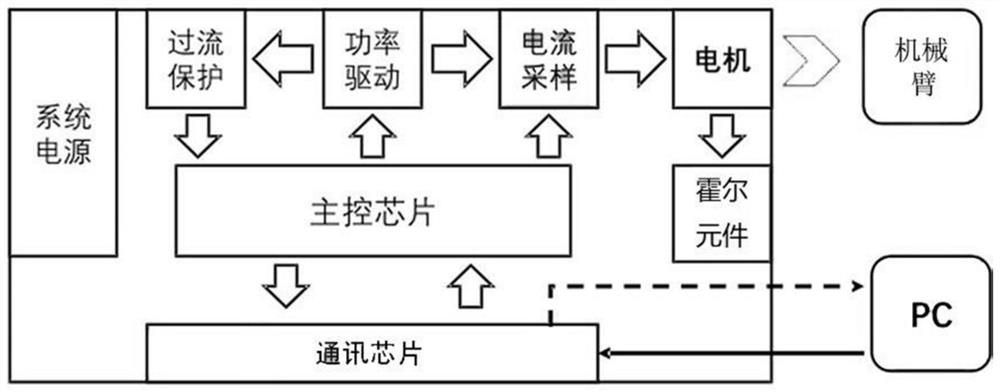
[0037] Such as figure 2As shown, the hardware of the collision detection system includes: a main control chip, an overcurrent protection mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com