

Robot anti-interference positioning method and device based on sliding window pose map optimization
A technology of sliding window and positioning method, which is applied in the direction of measuring devices, instruments, and electromagnetic wave reradiation, etc., which can solve problems such as large amount of calculation, inapplicability of robots, and poor positioning accuracy, so as to improve anti-interference ability and reduce memory usage , the effect of improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
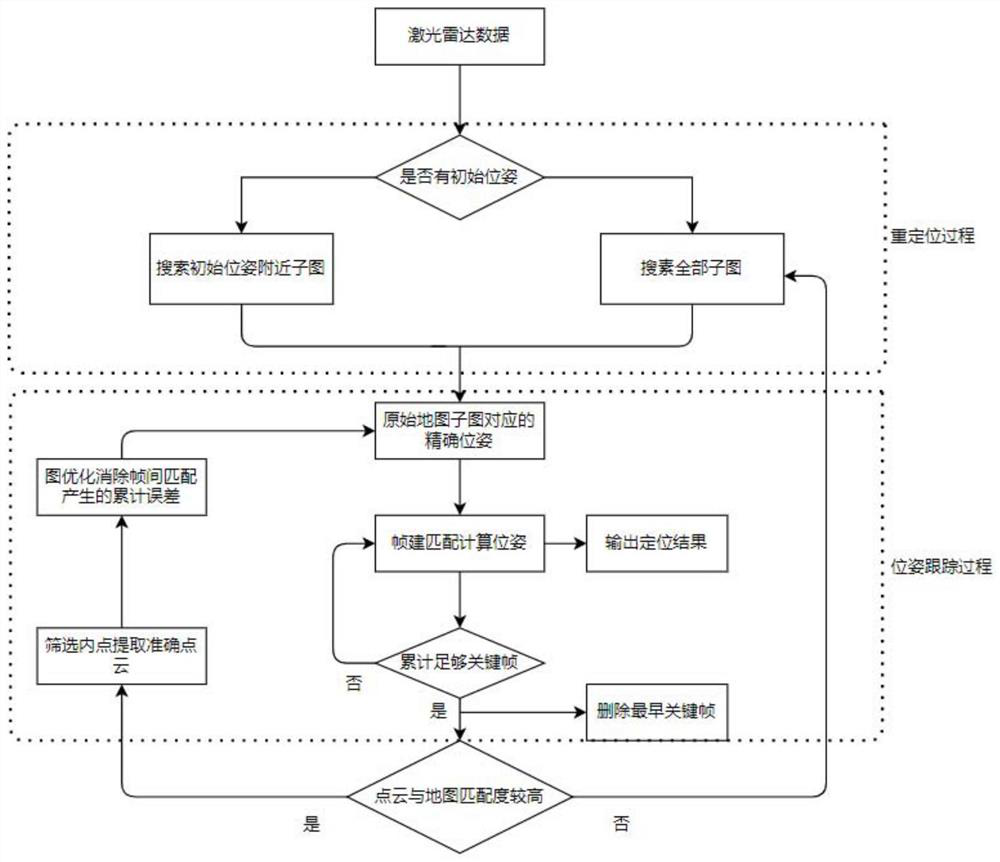
[0042] figure 1 A flow chart of an embodiment of the present invention is shown. An embodiment of the present invention relates to a robot anti-interference positioning method and device based on sliding window pose graph optimization, which is used for real-time precise positioning of a robot in an unknown state, and can Realize global relocation without long-term movement, with internal point screening mechanism, improve anti-interference ability, filter more accurately point cloud construction position map optimization to eliminate cumulative error, real-time pose tracking process in the sliding window near the current pose Perform accurate matching, output real-time pose, and have a scoring mechanism with the original map. When it is judged that the positioning is abnormal, it will automatically trigger global relocation.
[0043]A robot a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More