

Position tracking control method of multi-degree-of-freedom upper limb rehabilitation robot
A rehabilitation robot and tracking control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of long learning time, difficult to determine parameters, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0064] In the following description, numerous specific details are given in order to provide a more thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without one or more of these details. In other examples, some technical features known in the art are not described in order to avoid confusion with the present invention.
[0065] In order to thoroughly understand the present invention, detailed steps and detailed structures will be provided in the following description, so as to illustrate the technical solution of the present invention. Preferred embodiments of the present invention are described in detail below, however, the present invention may have other embodiments besides these detailed descriptions.
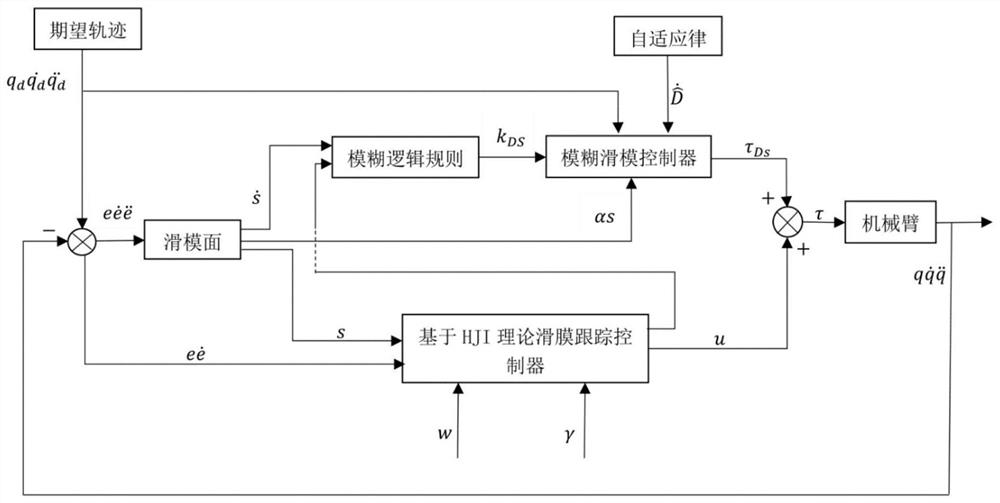
[0066] Please refer to figure 1 , the position tracking control method of a multi-degree-of-freedom upper limb rehabilitation robot provided by the present invention, the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More