

Laser three-dimensional point cloud-based autonomous pose estimation method for soft landing end segment of detector
A laser three-dimensional, pose estimation technology, applied in the field of space science, achieves the effect of realizing redundant output, balancing operation speed and accuracy requirements, and high accuracy of the method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The following will combine Figure 1 to Figure 7 The method for estimating the autonomous pose and orientation of the soft landing stage of the detector based on the laser three-dimensional point cloud of the present invention will be further described in detail.
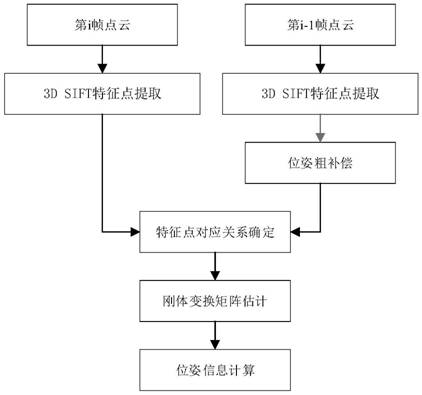
[0030] figure 1 Shown is a flow chart of the method for estimating the autonomous pose of the detector at the end of soft landing based on the laser three-dimensional point cloud of the present invention.
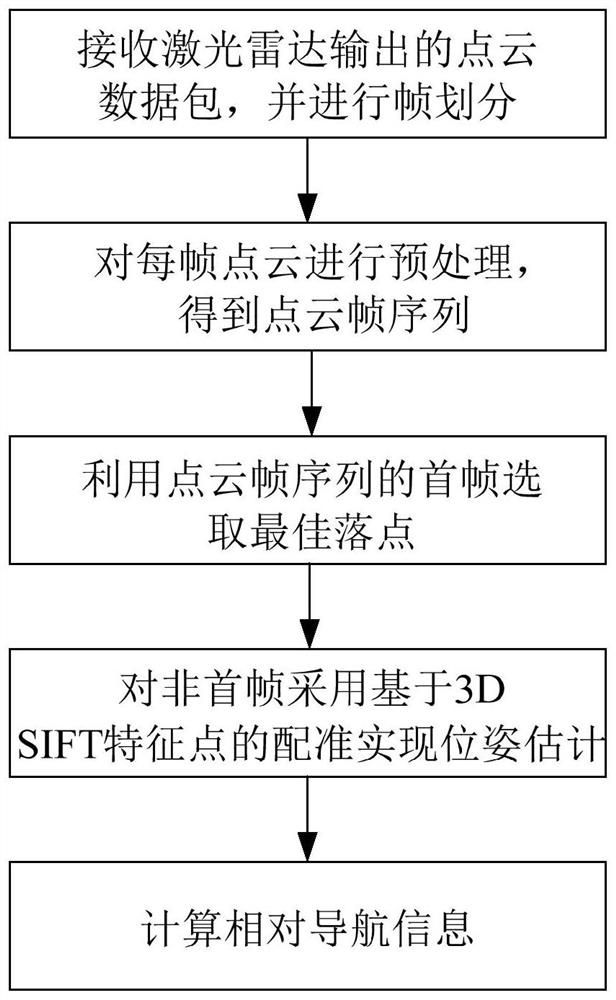
[0031] see figure 1 , the method for estimating the autonomous pose and attitude of the detector based on the laser three-dimensional point cloud at the end of the soft landing of the present invention, including:
[0032] 1) Receive the point cloud data packet output by the lidar, and perform frame division;
[0033] 2) Preprocessing each frame of point cloud to obtain a sequence of point cloud frames;
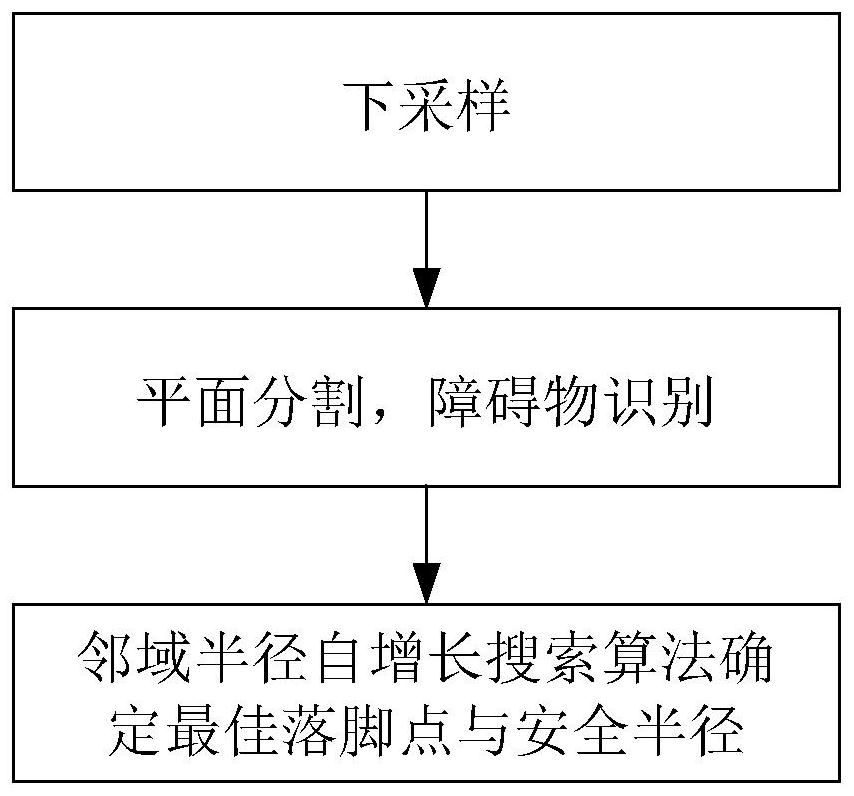
[0034] 3) Utilize the first frame of the point cloud frame sequence to select the best landing point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More