

Mining area target identification method based on fusion of fisheye camera and laser radar
A technology of laser radar and fisheye camera, which is applied in the field of environmental perception, can solve the problems of incomplete fusion, large degree of information loss, poor correction effect, etc., and achieve the effect of reducing hardware cost, complete feature extraction, and improving effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, but it should be understood that the protection scope of the present invention is not limited by the specific embodiments.
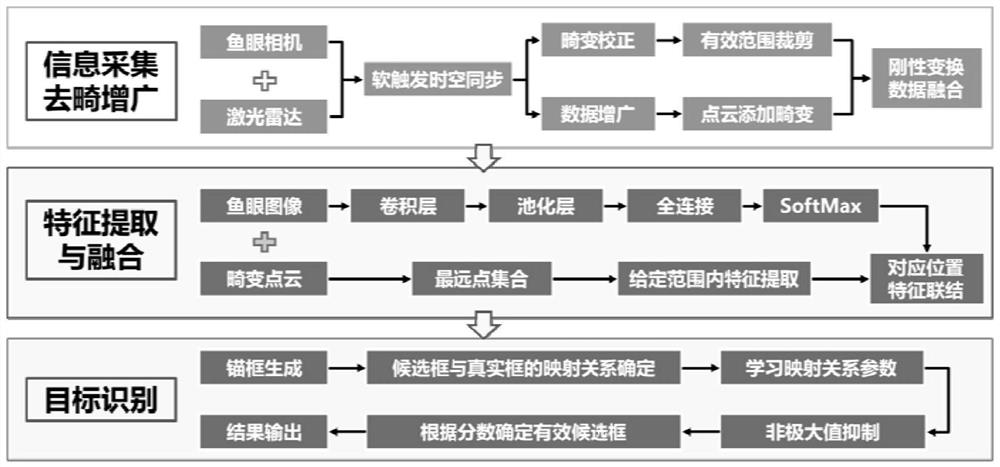
[0074] like figure 1 As shown, the present invention proposes a mining area target recognition method based on fisheye camera and laser radar fusion, and its steps include three steps: 1) information collection, de-distortion augmentation; 2) feature extraction and fusion; 3) two Stage object recognition network construction. The three steps present a serial relationship, all of which lay the foundation for the execution of the next step.
[0075] 1) Information collection, distortion correction and data augmentation:
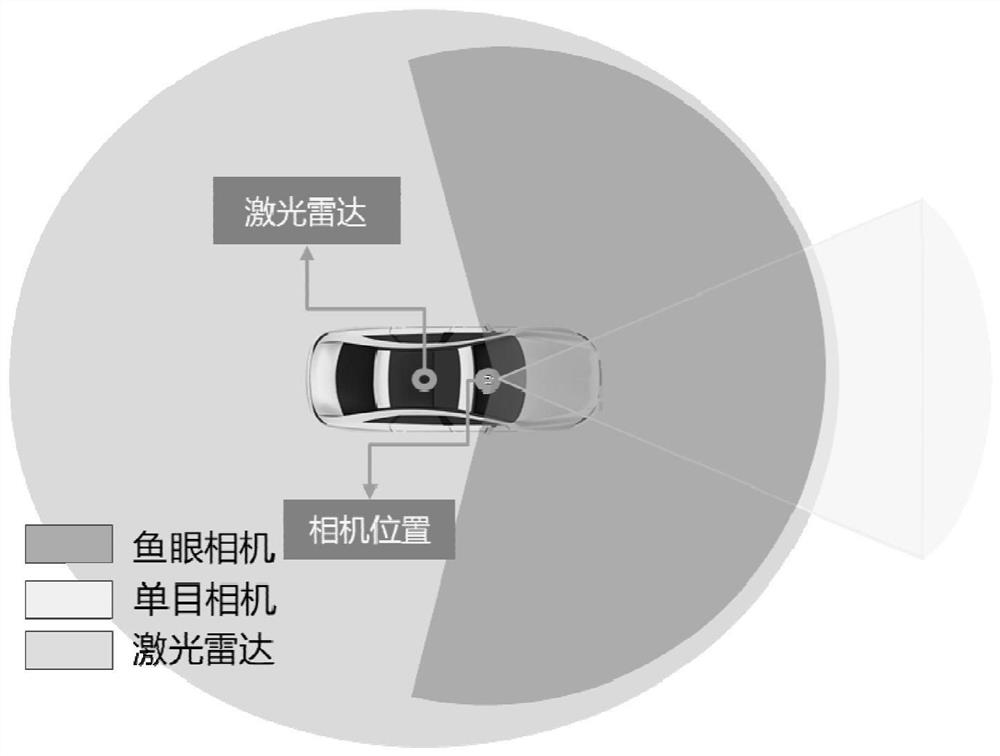
[0076] It is divided into two branches: image acquisition based on fisheye camera and point cloud acquisition based on lidar, to obtain real-time environmental information during driving in the mining...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More