

Industrial robot self-calibration device and method based on principle of perigon error close
An industrial robot and self-calibration technology, applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of lower calibration accuracy, high constraints, and calibration equipment errors, etc., to reduce the impact of calibration accuracy and simplify the device structure , easy-to-achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0059] Embodiments of the present invention are as follows:
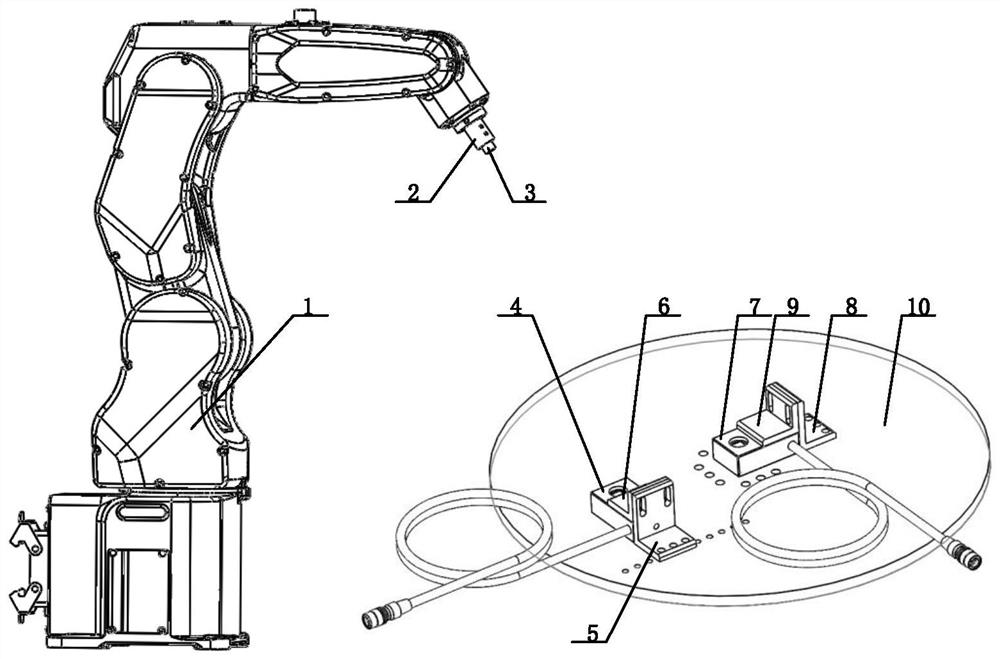
[0060] The specific implementation system is as figure 1 As shown, including industrial robot 1, and a circumferentially closed self-calibration device;
[0061] In the circumferentially closed self-calibration device, the semiconductor laser 3 is fixed on the end face of the end effector of the industrial robot 1 through the laser fixing device 2; specifically, the end effector of the industrial robot 1 is connected to the laser fixing device 2 through a threaded hole, and the semiconductor laser 3 is installed on the laser In the fixing device 2, the screw fixes the position of the semiconductor laser 3 in the laser fixing device 2 through the fixing screw hole, and the power connection line of the semiconductor laser 3 is drawn out from the laser fixing device 2 through the notch.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More