

Complex scene driving risk prediction method based on multiple time-space diagrams
A technology for risk prediction and complex scenarios, applied in neural learning methods, biological neural network models, neural architectures, etc., which can solve problems such as unfavorable applications, difficulties in building multi-vehicle collision risk prediction models, and failure to consider multi-vehicle collision risks. Achieve the effect of improving accuracy and practicality, and solving construction difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
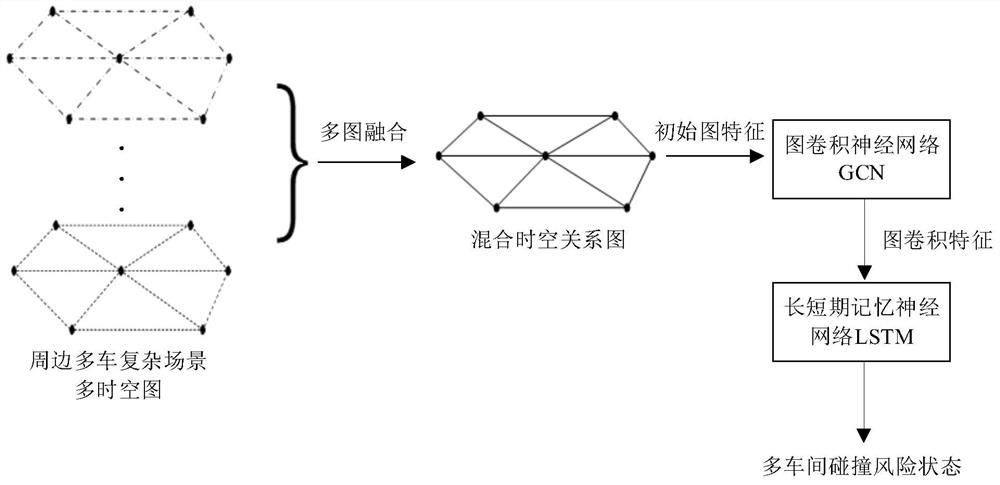
[0085] Such as figure 1 As shown, a complex scene driving risk prediction method based on multi-space-time graph, specifically includes the following steps:
[0086] Step 1, offline risk prediction model training
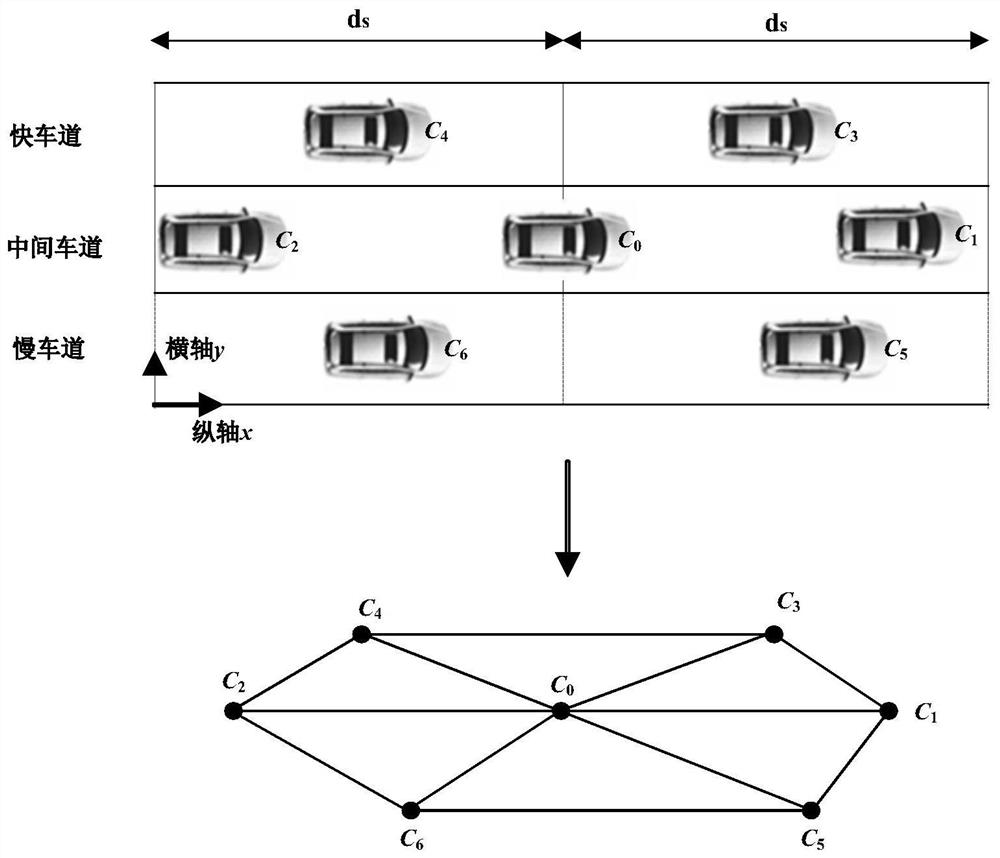
[0087] Take the self-vehicle and surrounding vehicles as the nodes in the graph at a certain moment, and take the vehicle position, velocity and acceleration as the node characteristics, and construct a node adjacency matrix reflecting different space-time relationships between vehicles, using the nodes in the graph, node characteristics and node adjacency matrix Obtain the multi-temporal-temporal graph describing the surrounding multi-vehicle complex scene, input the fused multi-temporal-temporal graph into the graph convolutional neural network, and extract ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More