Robot task knowledge self-generation system based on virtual demonstration
A technology for generating systems and robots, applied in knowledge expression, instruments, computer parts, etc., can solve the problem of robot task knowledge construction not having universality and interpretability, and achieve enhanced robustness, adaptability, and strong interpretability. , easy to transplant effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The invention will be described in detail below with reference to the accompanying drawings and specific examples. The present embodiment is implemented in terms of the technical solution of the present invention, and a detailed embodiment and a specific operation process are given, but the scope of the present invention is not limited to the following examples.
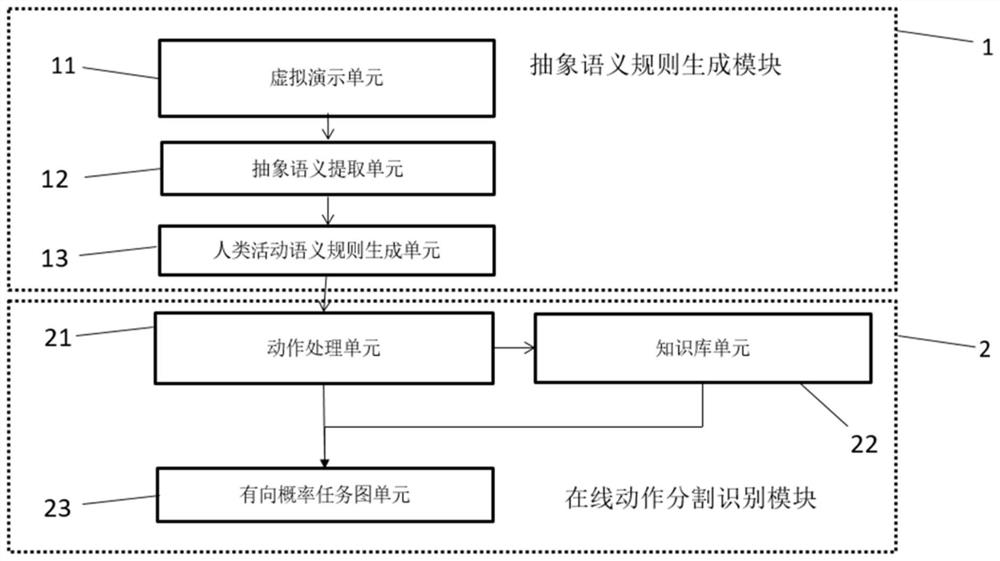
[0037] This embodiment is based on the Unity 3D gaming simulation platform, providing a virtual demo-based robot task knowledge self-generation system, specific structural function diagram, for example, by HTC Vive Pro devices. figure 1 As shown, including the abstract semantic rule generation module 1 and the online operation segmentation identification module 2:
[0038] The abstract semantic rule generating module 1 includes a virtual presentation unit 11, an abstract semantic extracting unit 12, and a human activity semantic rule generating unit 13. The virtual presentation unit 11 converts the action in the v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More