

Robot optimal path planning method based on Boolean constraint
An optimal path planning and robotics technology, applied in the field of robotics, can solve problems such as inability to meet actual needs, achieve good application prospects, improve efficiency, and good versatility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] Below in conjunction with embodiment and accompanying drawing, invention will be further described.
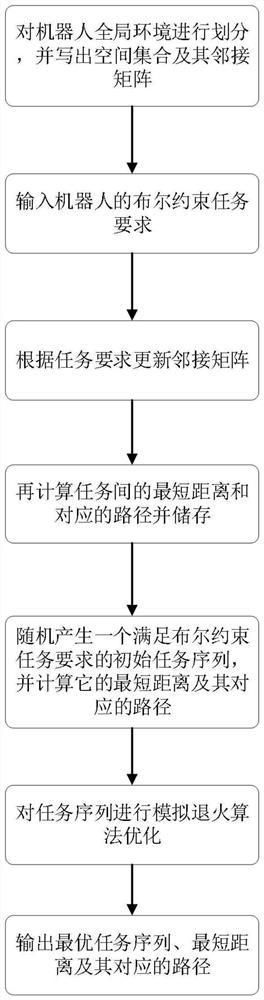
[0070] refer to figure 1 , a robot optimal path planning method based on Boolean constraints, including the following steps:
[0071] Step 1: Divide the global environment of the robot, and write out the space set and its adjacency matrix;
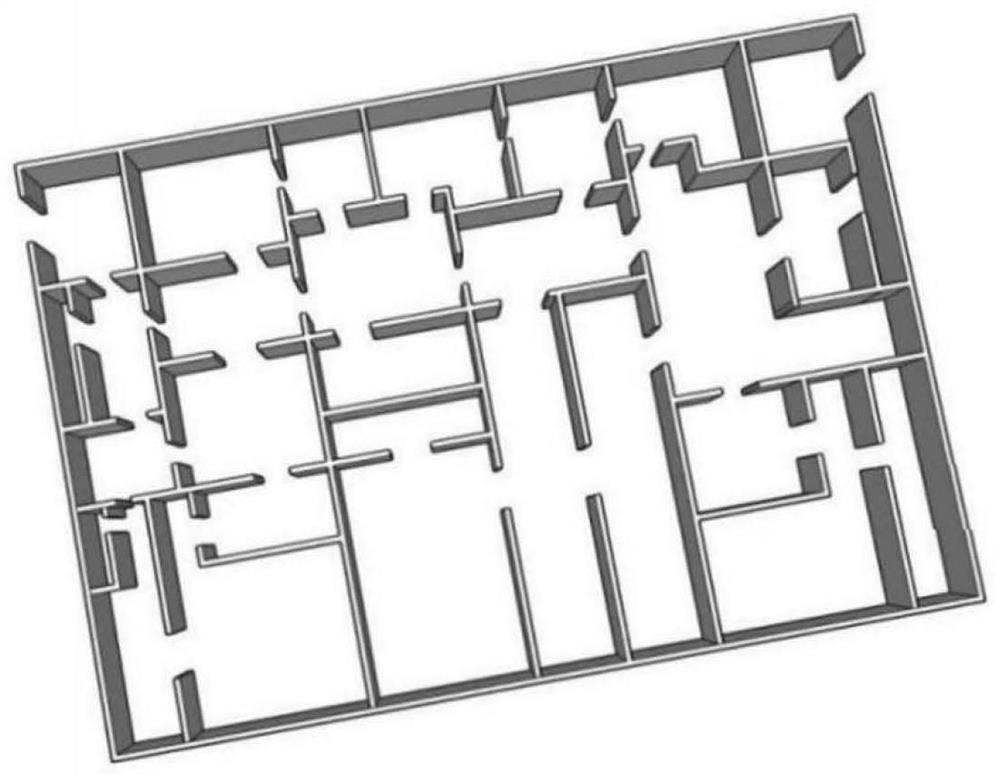
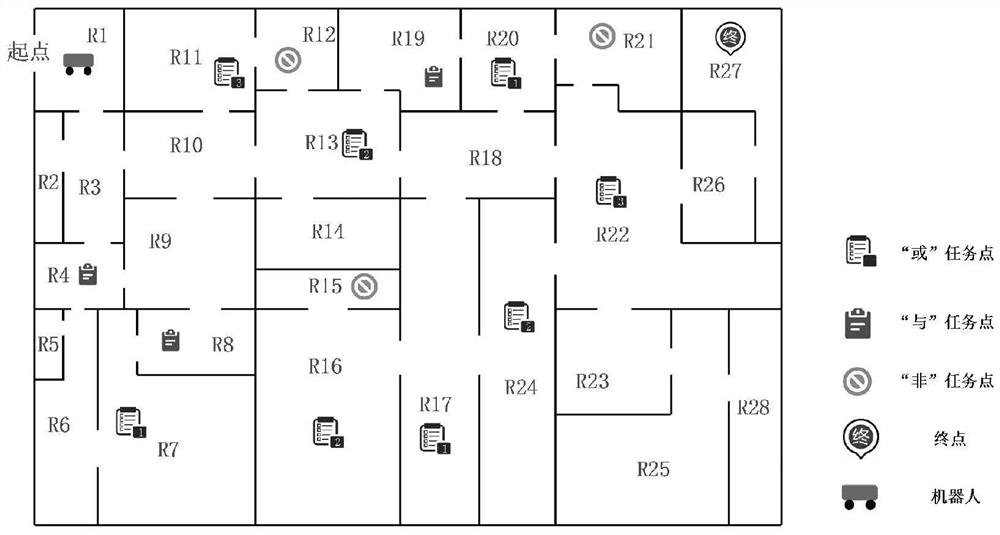
[0072] In this embodiment, the global environment of the robot is as follows: figure 2 As shown, the global environment is divided into 28 spaces, and the set R={R 1 , R 2 ,...,R 28} means, such as image 3 shown;
[0073] The adjacency matrix W is a symmetric matrix of 28×8, if the space R i and space R j connected, and the distance between the two spaces is ω i,j , then W(i,j)=ω i,j , otherwise W(i, j)=∞, and W(i, i)=0, i=1, 2,..., 28; the distance between all adjacent spaces in this embodiment is 1, then Can be based on Figure 4 Write out the adjacency matrix W, where W(1,1)=0, W(1,3)=1, W(2,2)=0, W(2,3)=1, W(3,1)= ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More