Moving target detection system and method based on multi-frame point cloud
A moving target and detection system technology, applied in neural learning methods, image data processing, image enhancement, etc., can solve problems such as missed detection of targets, failure to consider continuous frame point cloud data, and failure to predict target trajectories, etc., to improve detection accuracy , to avoid the effect of missed detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
[0034] The kitti data set used in the embodiment of the present invention, wherein the data set of the embodiment includes 5000 segments of continuous frame point cloud data with a length of 10, the pose of the point cloud acquisition device lidar and the three-dimensional information label of the target, of which 4000 segments The data is the training set, and the 1000 pieces of data are the verification set.
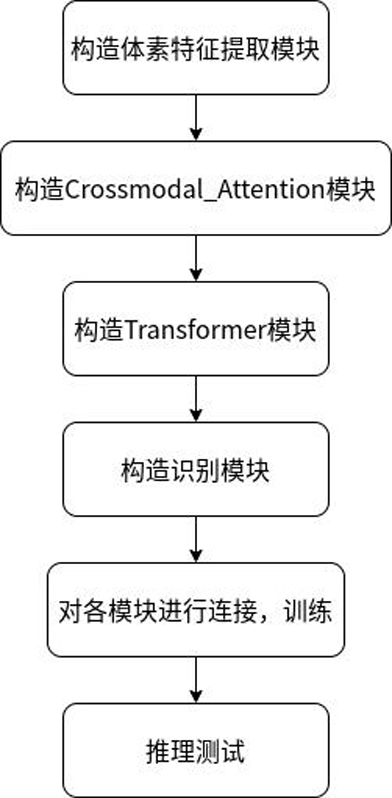
[0035] Such as figure 1 As shown, a moving target detection system and method based on multi-frame point cloud includes the following steps:
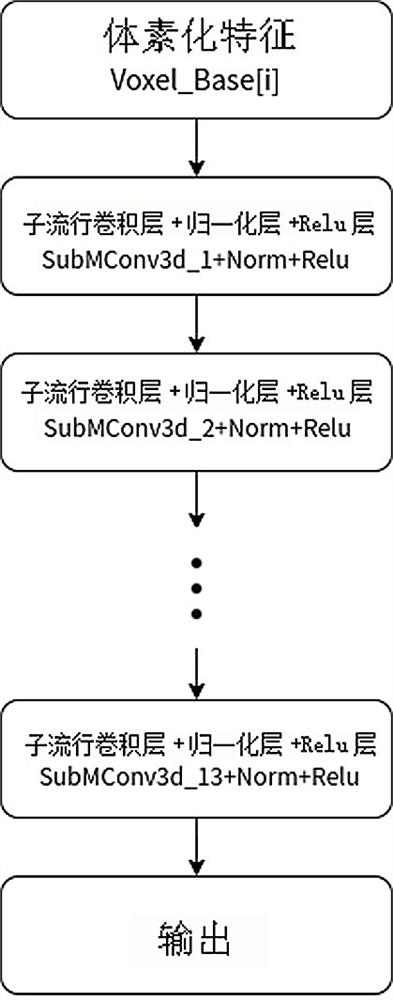
[0036] The first step: first construct the voxel feature extraction module.
[0037] Input a continuous fram...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More