Automatic driving data acquisition and fusion system and method
A technology for data acquisition and automatic driving, applied in radio wave measurement system, satellite radio beacon positioning system, radio wave reflection/re-radiation, etc., can solve problems such as clock error and time stamp information error, and avoid movement Distortion, high-precision synchronization, and hard synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
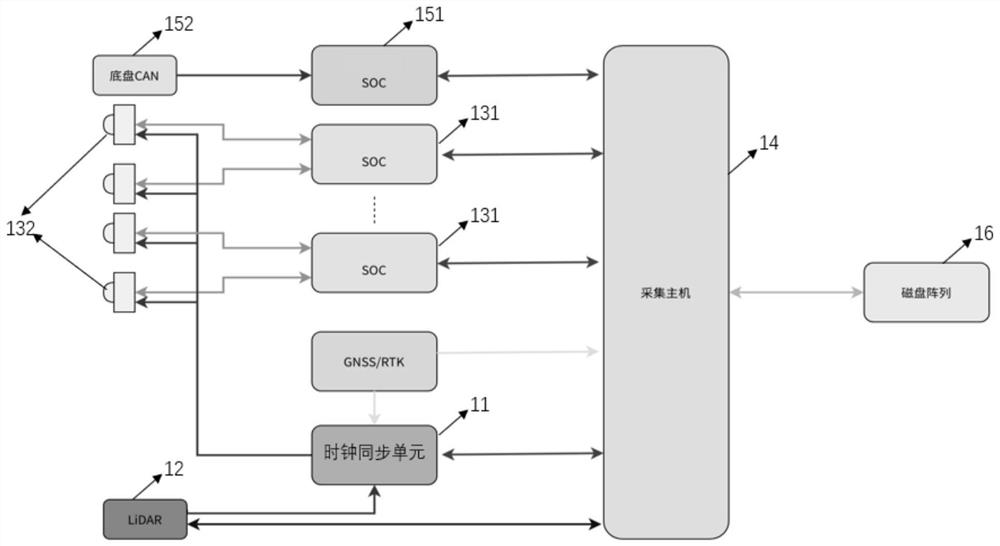
[0044] Such as figure 1 As shown, a kind of automatic driving data acquisition and fusion system is disclosed, and the system includes:
[0045] A clock synchronization unit 11, an acquisition host 14 and at least two different types of sensor units.
[0046] The acquisition host is used for outputting control signals to the different types of sensors and the clock synchronization unit, and receiving the acquisition data with time stamps sent by the different types of sensors for data fusion.
[0047] Specifically, the acquisition host can output power-on and power-off signals so as to activate or deactivate the sensor, and can also set the working modes of the sensor and the clock synchronization unit. The data processed by the acquisition host can be transmitted to the disk 16 for storage for later application.
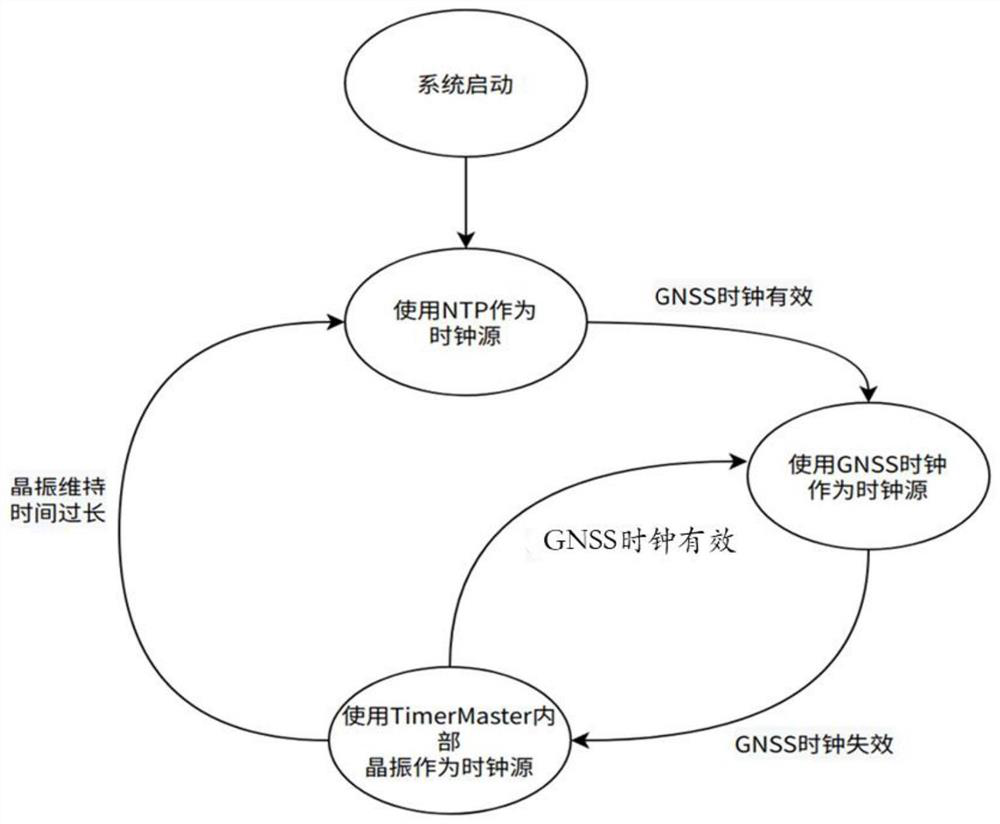
[0048] The clock synchronization unit is used to determine the current time according to the GNSS signal and provide time service to different types of sensors an...
Embodiment 2
[0052] The types of sensors in different scenarios can be set as required. In this embodiment, the different types of sensor units include at least one radar sensor 12 and at least one image acquisition sensor unit. Specifically, the radar sensor may be a laser radar and / or a millimeter-wave radar or the like.
[0053] Each of the radar sensors is used to scan the scene by rotating to collect corresponding point cloud data and send it to the collection host with a time stamp. The image acquisition sensor unit is used for image acquisition to obtain corresponding image data and send it to the acquisition host after adding a time stamp, so that the acquisition host can perform data fusion. In this application, the image acquisition sensor unit may include a camera, a camera, and the like.
[0054]Although the clock domains between the radar sensor and the image sensor have been synchronized through the settings in Embodiment 1, the data collected between the radar sensor and th...
Embodiment 3
[0060] In one frame of image, there are still thousands of rows of pixels, and the exposure time is different. When it is subsequently fused with the point cloud data of the lidar, a finer-grained matching cannot be achieved. For this reason, the image acquisition sensor unit in this application is also used to determine the exposure time of each row of pixels according to the image exposure time and the row pixels of each frame of image in the image data to determine each row of each frame of image in the image data Timestamp of the pixel;
[0061] The acquisition host is used to perform fusion according to the time stamp of each row of pixels of each frame image and the point cloud data carrying the time stamp.
[0062] Specifically, the unit exposure time of each row of pixels can be obtained by dividing the total exposure time of each frame of image by the number of row pixels, based on the initial exposure time of the image, the unit exposure time of each row of pixels, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More