

Water surface unmanned ship path tracking method based on intelligent predictive control
A path tracking and intelligent prediction technology, applied in non-electric variable control, control/regulation systems, two-dimensional position/channel control, etc. Avoid deviating from the target path, improve measurement accuracy, and smooth the effect of the curve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0118] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings.
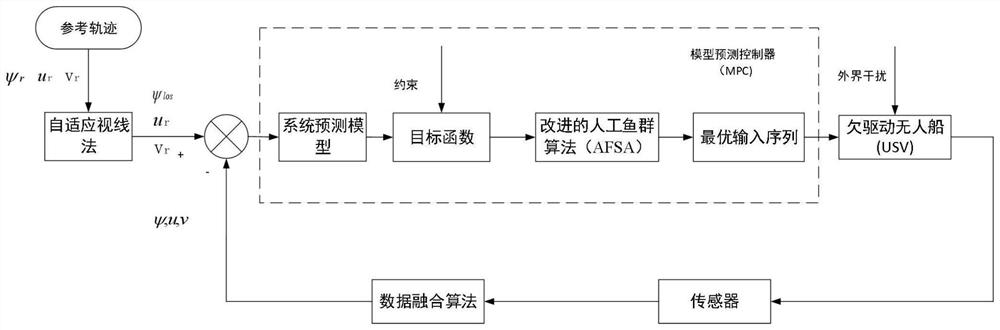
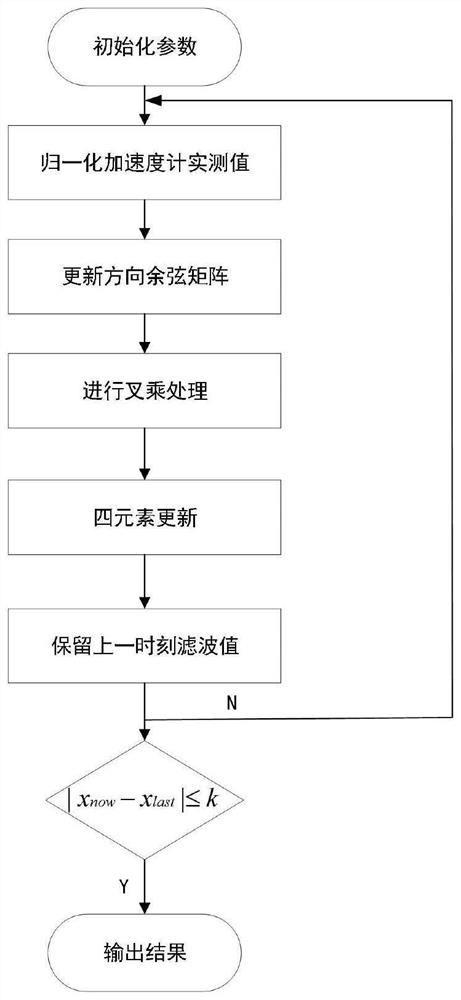
[0119] Such as figure 1 As shown, is the control system structure diagram of the unmanned ship. In the path tracking process of the unmanned ship, firstly, the attitude data is measured by the inertial navigation sensor, the data fusion algorithm is proposed, the threshold increment constraint is set, and the complementary filtering algorithm is improved. The heading angle is filtered; then, according to the position of the expected path point and the real-time position of the unmanned ship measured by Beidou, an adaptive line of sight method is proposed to calculate the optimal acceptance circle radius, and the expected heading angle of the unmanned ship is calculated. ; Then, under the condition of given speed, the error between the filter feedback value and the expected heading angle is used as the input of the model predictive controller; finally, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More