

A Curve Fitting Method Based on Velocity Planning
A technology of curve fitting and speed planning, which is applied in the direction of program control, instrument, electrical program control, etc., can solve the problems of discrete straight lines or arc segments, increasing the processing capacity and calculation burden of the numerical control system, etc., to achieve speed planning and The interpolation calculation is simple, meets the real-time requirements, and reduces the calculation burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
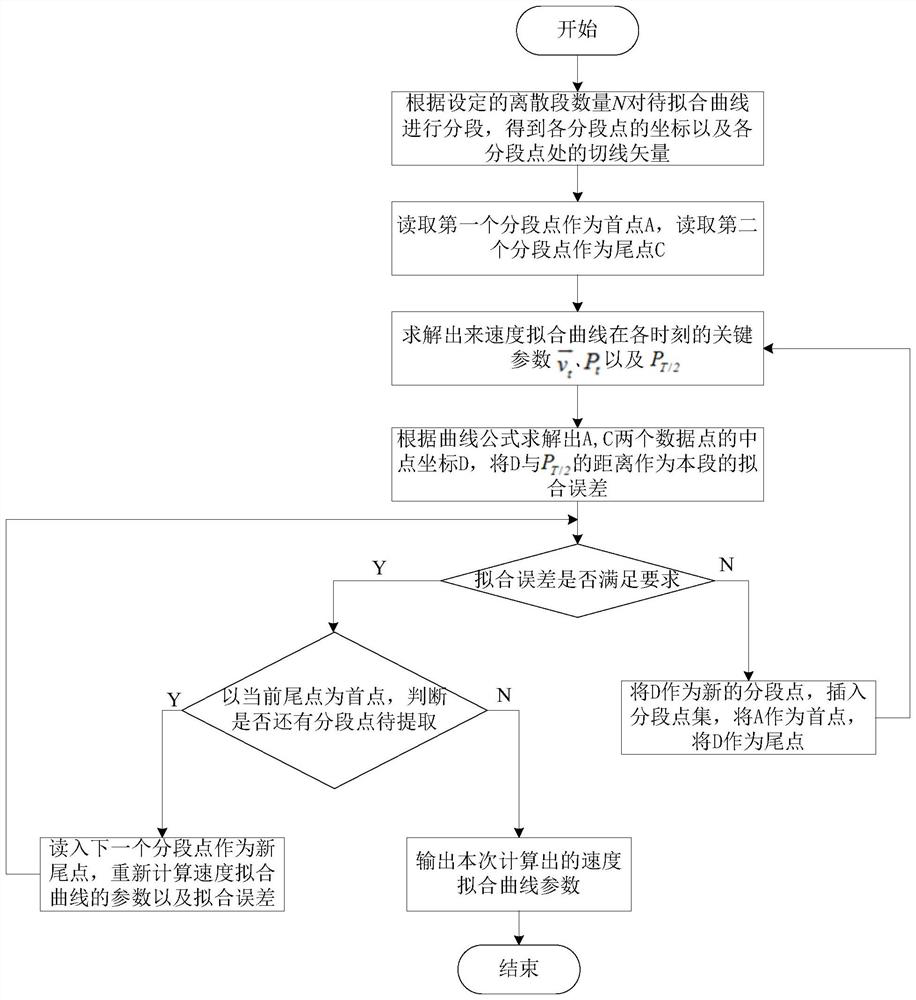
[0056] Specific implementation mode 1. Combination figure 1 and Image 6 This embodiment will be described. A curve fitting method based on speed planning described in this embodiment, the method specifically includes the following steps:
[0057] Step 1. Input the parameters of the curve to be fitted, and segment the curve to be fitted according to the set number of discrete segments N, to obtain the coordinates of each segmented point and the tangent vector at each segmented point;
[0058] According to the input parameters, the curve to be fitted can be generated, and then the curve to be fitted can be segmented according to the set number of discrete segments N, and then the midpoint coordinates of each segment for subsequent comparison can be obtained;
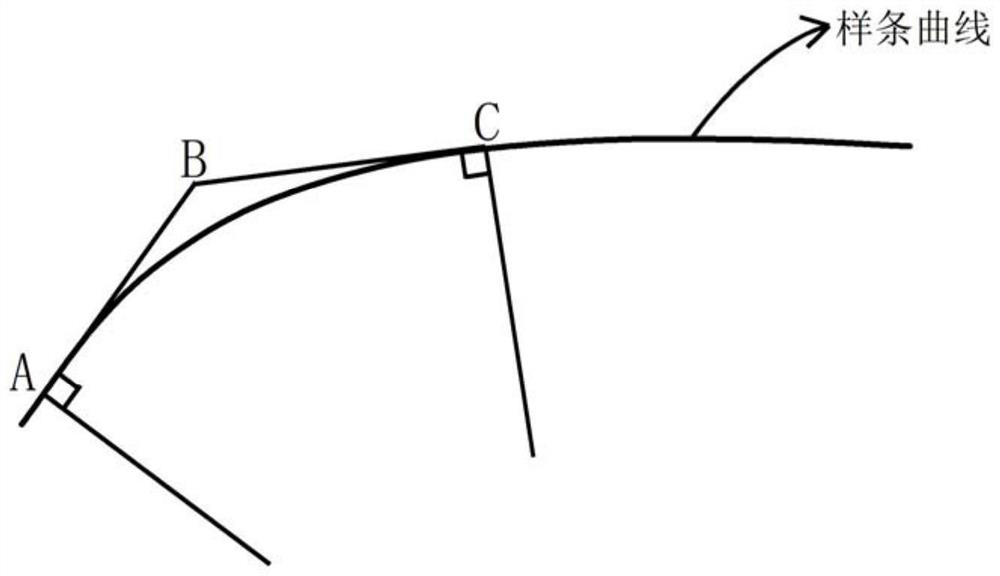
[0059] Step 2. Read in the first segment point and the second segment point, take the first segment point as the first point and record it as point A(x A ,y A ,z A ), take the second segment point as the end point an...
specific Embodiment approach 2
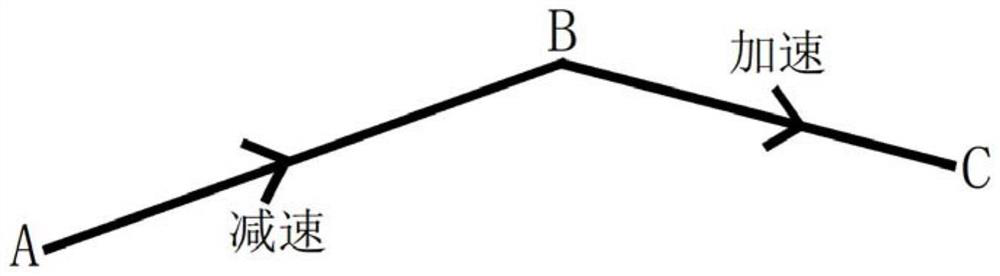
[0068] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that the initial velocity v at point A is calculated according to the length of the straight line segment AB A , and then according to v A Calculate the acceleration a on the straight line segment AB AB ; The specific process is:
[0069]
[0070] Among them, s AB is the length of straight line segment AB,
[0071]
[0072] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0073] Specific embodiment 3: The difference between this embodiment and specific embodiment 1 or 2 is that the velocity v at point C is calculated according to the length of straight line segment BC C , and then according to v C Calculate the acceleration a on the straight line segment BC BC ; The specific process is:
[0074]
[0075] Among them, s BC is the length of straight line segment BC,
[0076]
[0077] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More