Self-supervised monocular depth estimation method and device
A depth estimation and single-purpose technology, applied in the field of depth estimation, can solve problems such as low interpretability, hindering deployment and application, and achieve the effect of improving convergence ability, improving usability, and eliminating interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
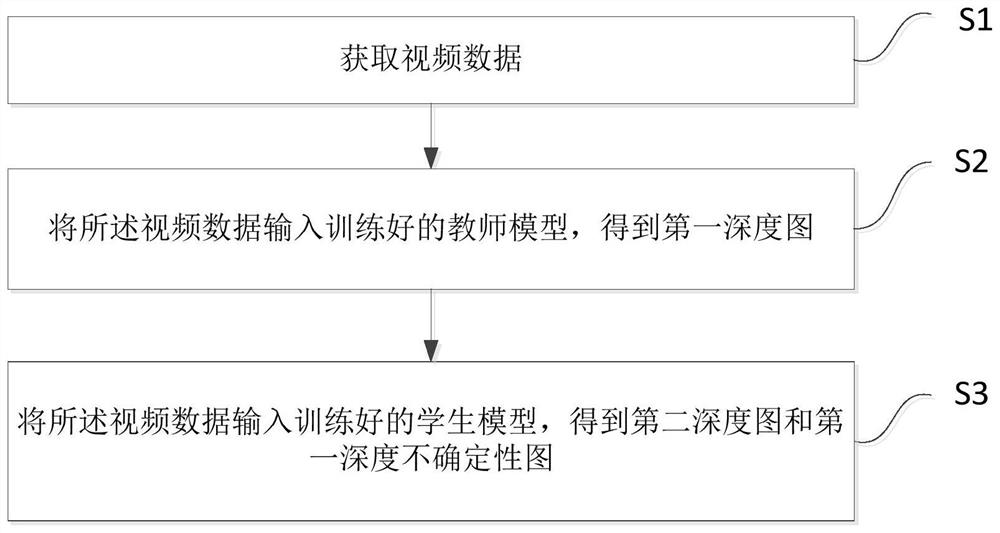
[0063] This embodiment implements a self-supervised monocular depth estimation method, such as figure 1 shown, including:
[0064] S1. Obtain video data;
[0065] S2. Input the video data into the trained teacher model to obtain the first depth map;
[0066] S3. Input the video data into the trained student model to obtain a second depth map and a first depth uncertainty map;
[0067] Wherein, the training method of the teacher model is a self-supervised training method, the training method of the student model is a supervised training method, and the teacher model and the student model adopt joint training.
[0068] Specifically, the teacher model and the student model adopt joint training, including:
[0069] Load unlabeled video data into the teacher model;
[0070] Adopt the self-supervised training method to train the teacher model, and predict the third depth map;
[0071] Create a depth estimation task dataset with pseudo-labels based on the third depth map;
[00...
Embodiment 2
[0089] This embodiment provides a self-supervised monocular depth estimation method, such as figure 2 As shown, first construct the teacher model, then load unlabeled video data into the teacher model, and then judge whether there is a depth uncertainty mask, if it exists, load the depth uncertainty mask, if not, load it Blank mask, and then conduct self-supervised training on the teacher model and predict the dense depth map, use the dense depth map to create a pseudo-data set, construct a student model and take supervised training on the student model, and judge whether the teacher model and the student model converge , if not converged, predict the depth uncertainty map and calculate the depth uncertainty mask based on the depth uncertainty map, and end if converged. In addition, the calculated uncertainty mask is used for the optimization of the teacher model, and the training is performed iteratively until both the teacher model and the student model are trained.
[009...
Embodiment 3
[0110] This embodiment provides a self-supervised monocular depth estimation method, comprising: acquiring video data; inputting the video data into a trained teacher model to obtain a first depth map; inputting the video data into a trained student model , to obtain the second depth map and the first depth uncertainty map; wherein, the training method of the teacher model is a self-supervised training method, the training method of the student model is a supervised training method, and the teacher model and the The above student models are trained jointly.
[0111] Specifically, the joint training adopts the self-boosting structure in the self-boosting mechanism, Figure 4 It is a schematic diagram of the working process of the self-elevating structure, such as Figure 4 As shown, the structure work process contains a training step and an optimization step. The training step adopts a self-training mechanism, using the prediction result of the teacher model as the data label...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More