

Series mechanical arm forward kinematics modeling method based on improved D-H method
A modeling method and robotic arm technology, applied in geometric CAD, complex mathematical operations, special data processing applications, etc., can solve the problems of incomplete description of relative positional relationship, high repetition of calculation process, etc., to facilitate programming operations and simplify surveying and mapping Process, highly repeatable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
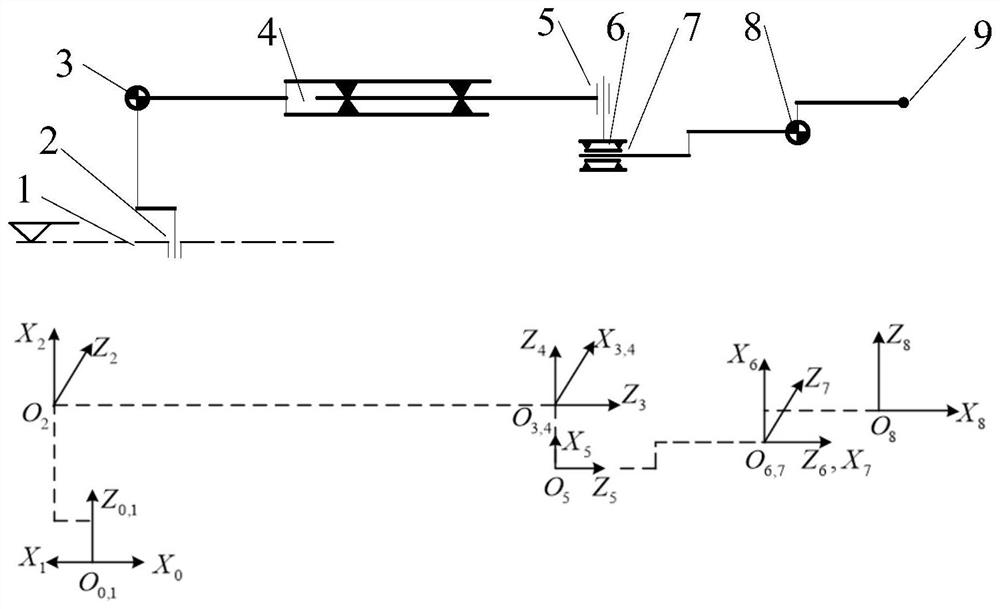
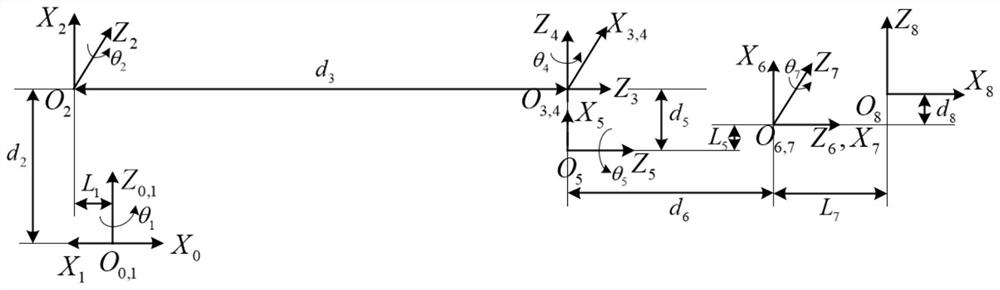
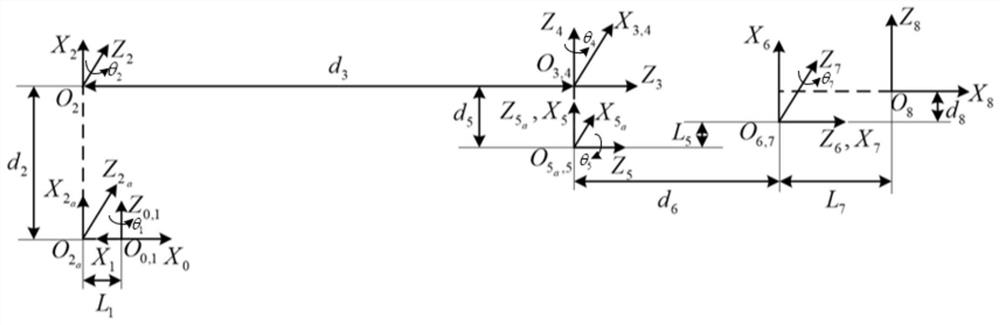
[0067] The invention is further illustrated in conjunction with the accompanying drawings and examples.
[0068] The structure, proportion, size, etc., which are shown in the drawings of this specification, are only used in conjunction with the contents disclosed in the specification, and those who are familiar with this technique are not intended to limit the defined conditions that the present invention can implement. There is no technological substantive significance, the modification of any structure, the change or size of the proportional relationship, without affecting the efficacy and the purpose of the present invention, should still be disclosed in the present invention The content covers the range. At the same time, the use of "upper", "" "," left "," right "," middle "," "", ",", ",", ",", ",", ",", ",", "," The invention can be implemented, and the relative relationship is changed or adjusted, and it is also considered to be a scope of the embodiments of the present in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More