

Control system, method and device of pipeline robot, electronic equipment and medium
A pipeline robot and control system technology, applied in mechanical equipment, pipes/pipe joints/pipe fittings, instruments, etc., to achieve the effect of improving timeliness and improving control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The principles and features of the present invention are described below, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
[0040] The technical solution of the present invention and how the technical solution of the present invention solves the above technical problems will be described in detail below with specific embodiments. The following specific embodiments may be combined with each other, and the same or similar concepts or processes may not be repeated in some embodiments. Embodiments of the present invention will be described below with reference to the accompanying drawings.
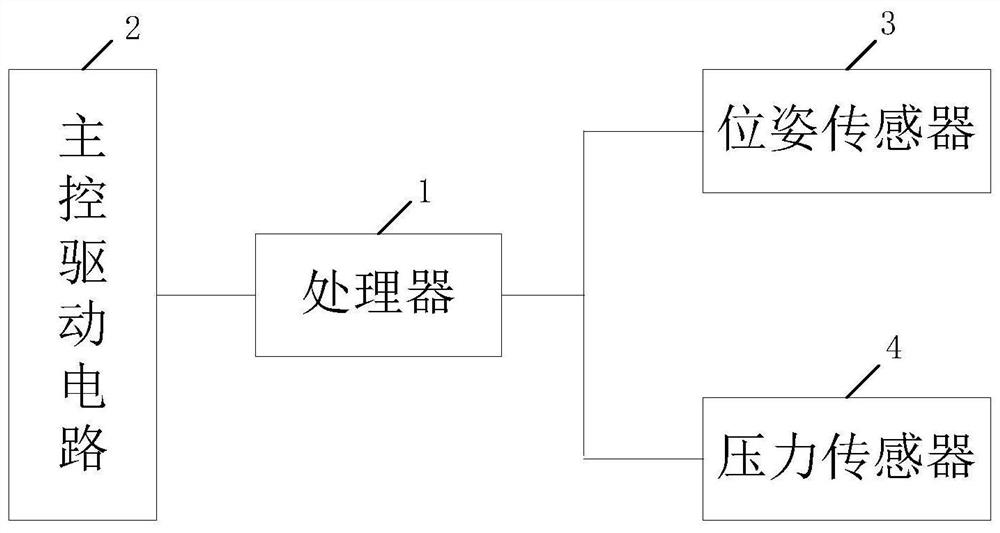
[0041] The embodiment of the present invention provides a possible implementation, such as figure 1 As shown in , a structural schematic diagram of a pipeline robot control system is provided, as shown in figure 1 As shown in the schematic diagram, the control system may include:
[0042] A proce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More