

Unmanned helicopter tracking control method considering input saturation
An unmanned helicopter and tracking control technology, applied in the field of flight control, can solve problems affecting the control accuracy and response speed of unmanned helicopters, and achieve the effects of improving control accuracy and response speed, fast and accurate estimation, and reducing computational complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
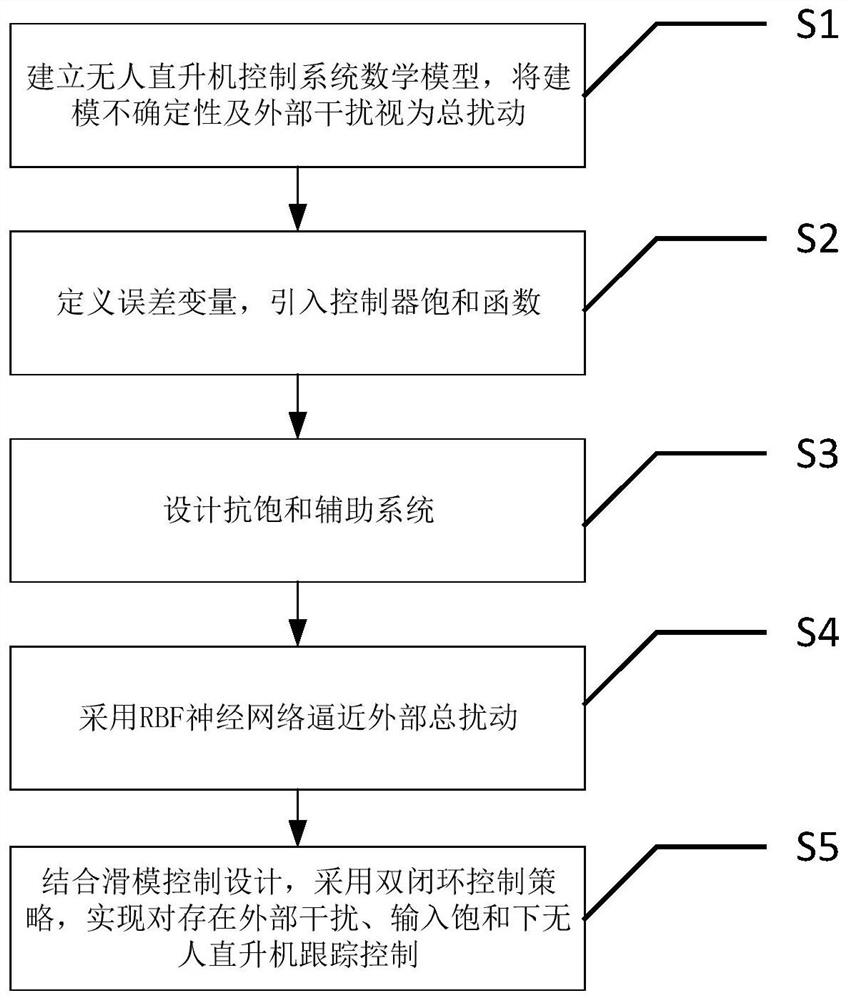
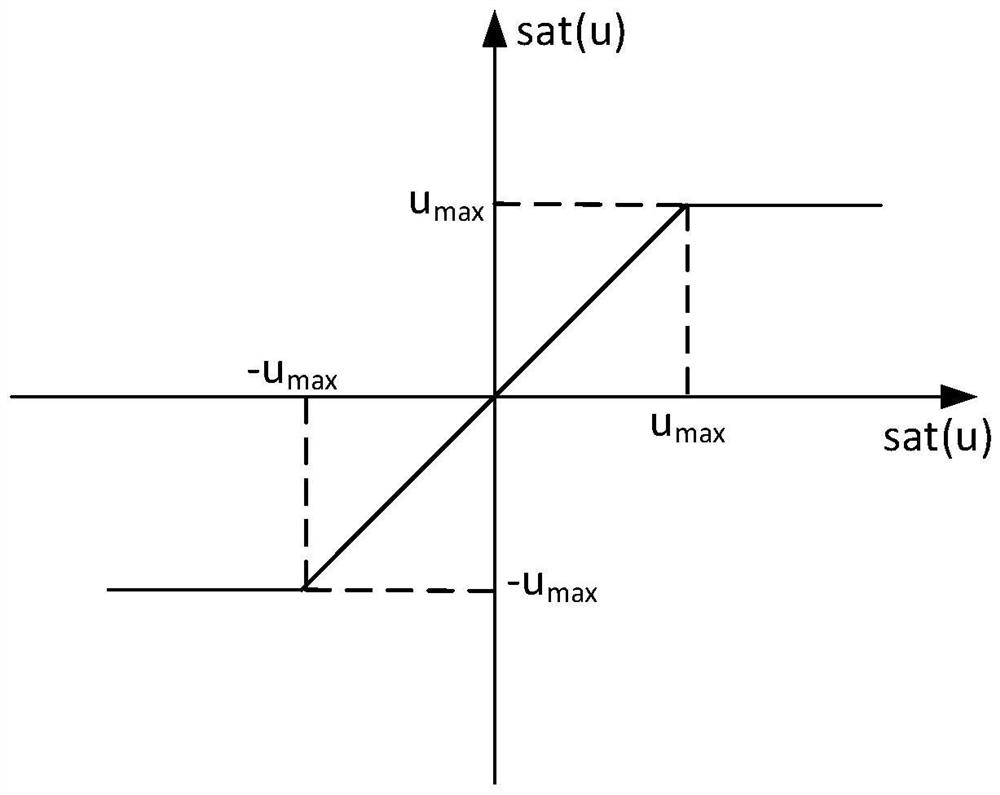
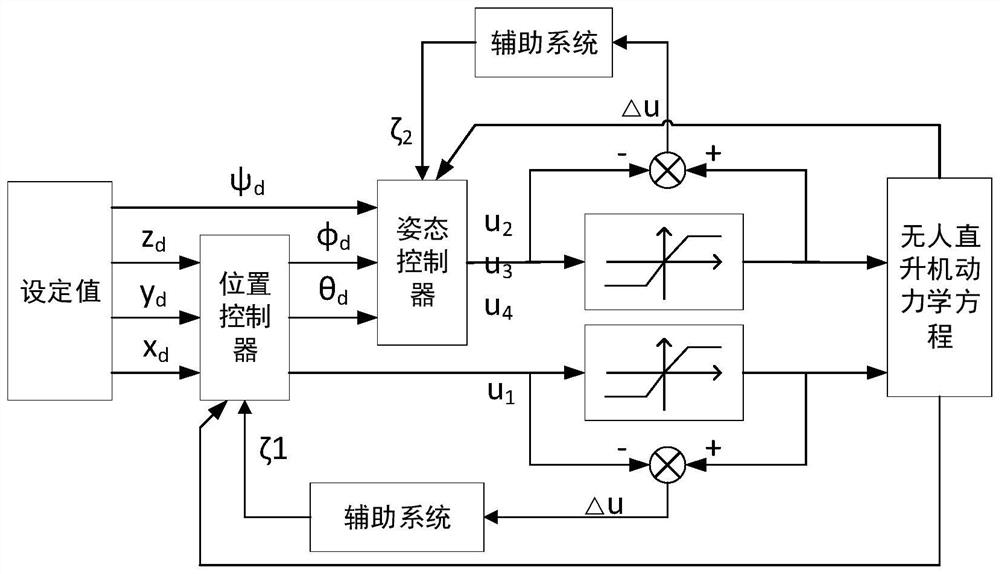
[0068] Such as Figure 1-3 As shown, an unmanned helicopter tracking control method considering input saturation includes the following steps:
[0069] Step 1: Establish the mathematical model of the unmanned helicopter control system according to the Newton-Euler equation, and regard the modeling uncertainty and external disturbance as the total disturbance;
[0070] The mathematical model of the unmanned helicopter control system is as follows:
[0071]
[0072] Among them, state P=[x y z] T and V=[u v w] T are the position and velocity of the center of mass of the unmanned helicopter in the inertial coordinate system; state Θ=[φ θ ψ] T and ω=[p q r] T are respectively the attitude angle and the angular velocity vector of the unmanned helicopter relative to the body coordinate system; I m is moment of inertia; d P , d Θ is the total disturbance synthesized by modeling uncertainty and external disturbance; m is the mass of unmanned helicopter; g is the acceleration ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More