

A Design Method of Robust Inverse Model Learning Gain Based on FIR Filter
A design method and inverse model technology, which is applied in the field of ultra-precision motion control, can solve the problems such as the difficulty of effectively designing the time-advanced link of the low-pass filter, and achieve the effect of overcoming blindness and simple implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
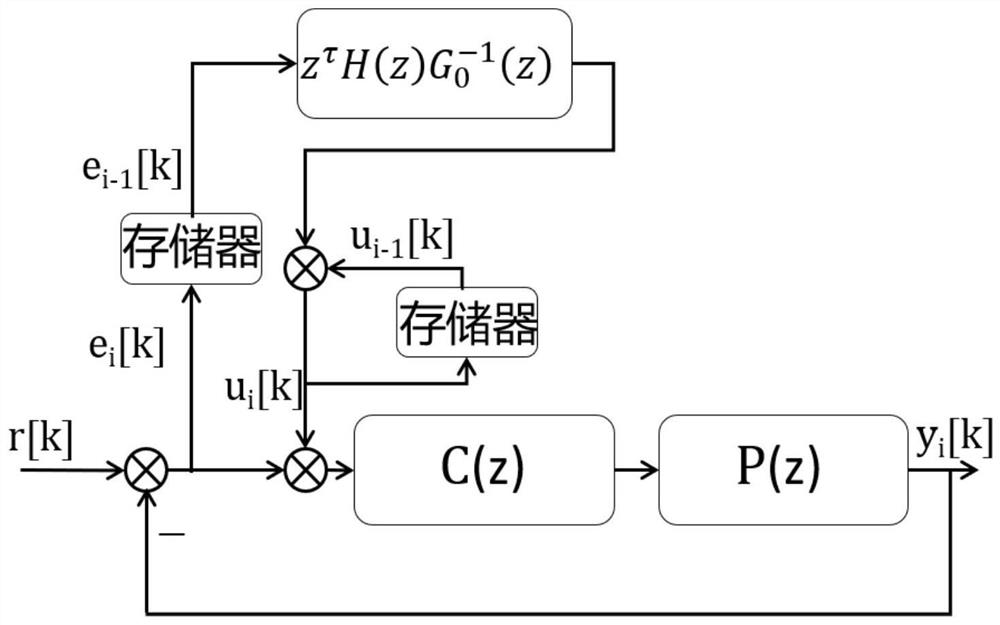
[0053] using as figure 1 The shown two-degree-of-freedom control scheme performs trajectory tracking control on the linear motion system, wherein the feedforward control adopts the robust inverse model iterative learning control method, and the learning gain is designed by the method disclosed in the present invention.
[0054] The linear motion system can be simplified as a rigid body, so we have m is the motion quality of the linear motion system, and T=0.0002s is the sampling period of the control system.
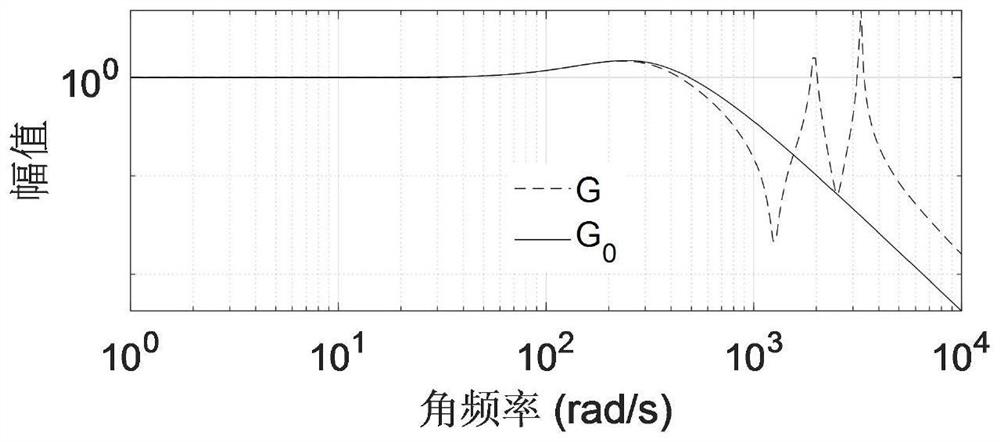
[0055] Then a reasonable feedback controller C(z) can be designed. Under this feedback controller, the actual model of the closed-loop system G(z) and G 0 The amplitude-frequency characteristics of (z) are as follows figure 2 It can be seen that there is a large model error in the high frequency band between the two.
[0056] Select the passband cutoff frequency ω of the low-pass filter H(z) p =0.04π(rad / T), equivalent to 100Hz, slightly larger than figure 2 The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More