

Six-axis mechanical arm control system based on first-order variable gain ADRC
A six-axis manipulator and control system technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as high processor performance requirements and difficult parameters, and achieve good robustness and avoid dynamic response changes. Effects of slowness, simplified structure and algorithmic complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
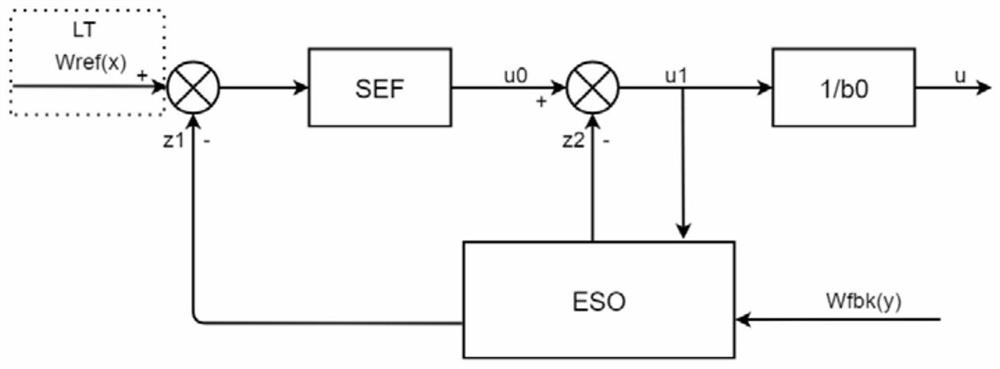
[0045] Such as figure 1 As shown, the six-axis robotic arm control system based on the first-order variable gain ADRC described in this embodiment includes a first-order variable gain ADRC controller, and the first-order variable gain ADRC controller mainly includes the following three modules:
[0046] (1) Linear Tracker (Linear Tracker, LT)
[0047] The speed setting of the servo six-axis robot arm is mainly generated by the path and speed planning of the host computer, and then sent to the servo drive system in real time through the protocol. In theory, there is no sudden change in speed. Therefore, in order to maximize the response speed of the controller, the traditional ADRC differentiator tracker is discarded, and the given speed is directly output, as shown in the following formula
[0048]
[0049] (2 Extended State Observer (ESO)
[0050] As the core part of ADRC, ESO regards all internal and external disturbances of the controlled system as one, expands a new s...
Embodiment 2
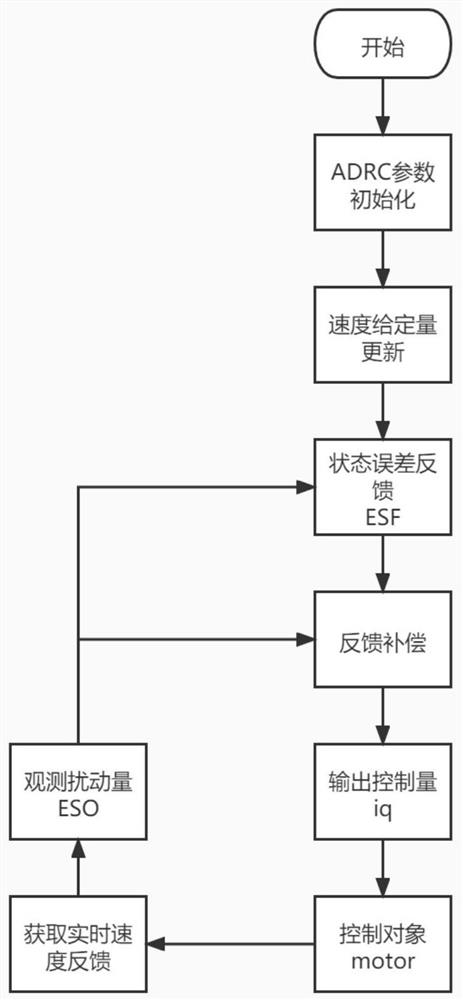
[0070] Such as figure 2 Shown; The first-order variable gain ADRC control method includes the following steps:
[0071] S1 ADRC parameter initialization, S2 speed reference update, S3 state error feedback ESF, S4 feedback compensation, S5 output control quantity iq, S6 control object motor, S7 obtain real-time speed feedback, S8 observation disturbance ESO; the S8 observation disturbance ESO transmits data to S3 state error feedback ESF and S4 feedback compensation.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More