

Bar chamfering robot system and method
A robot system and robot body technology, applied in the field of bar chamfering robot system, can solve the problems of large dependence on bending degree and end face inclination, reduce work efficiency, and large amount of chamfering, so as to improve the quality of chamfering, Improve work efficiency, the effect of simple feeding mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to express the purpose, features and advantages of the patent of the present invention more clearly, the specific implementation of the patent of the present invention will be described in detail below in conjunction with the accompanying drawings.
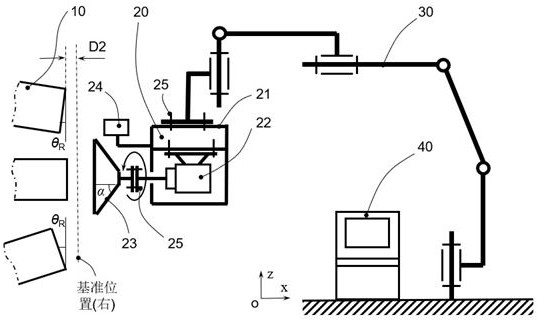
[0033] Such as figure 1 As shown, a bar chamfering robot system and method includes an end effector 20 , a robot body 30 , a control system 40 and a position sensor 50 . The end effector 20 includes a fixed frame 21, a driving motor 22, a grinding head 23 and an industrial camera 24. The fixed frame 21 is connected to the end of the robot body 30 through a bolt 25, and the driving motor 22 is connected to the fixed frame through a bolt 25. 21, the industrial camera 24 is connected to the fixed frame 21 through a special fixture, and the robot body 30 is a six-degree-of-freedom robot.
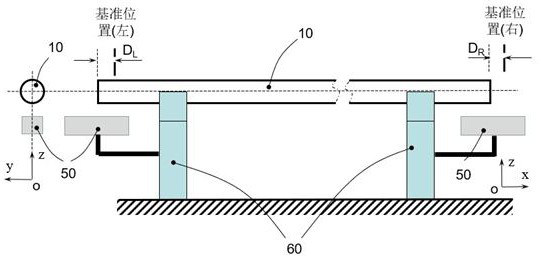
[0034] Such as figure 2 As shown, the bar position sensor 50 is arranged directly under the left and right ends of the bar 10, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More