

Intelligent agricultural machine static and dynamic object detection path planning method based on convolutional neural network
A convolutional neural network and path planning technology, which is applied in the field of path planning for static and dynamic object detection of intelligent agricultural machinery, can solve problems such as effectiveness, poor stability, low classification efficiency, and inability to effectively distinguish obstacles, achieving high stability , the effect of improving the resolution efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
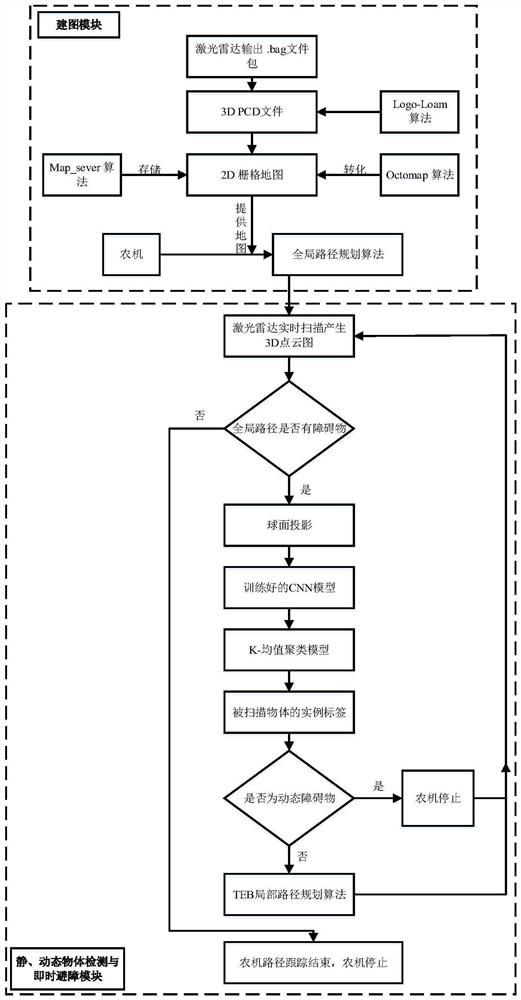
[0043]The invention proposes a path planning method for static and dynamic object detection of intelligent agricultural machinery based on a convolutional neural network. Its path planning flow chart is as follows: figure 2 shown.
[0044] The present invention is based on a basic framework composed of TEB (Timed-Elastic-Band) local path planning module, CNN module, Lego-Loam and Octomap map conversion module, Map_sever map preservation module and K-means clustering algorithm module.
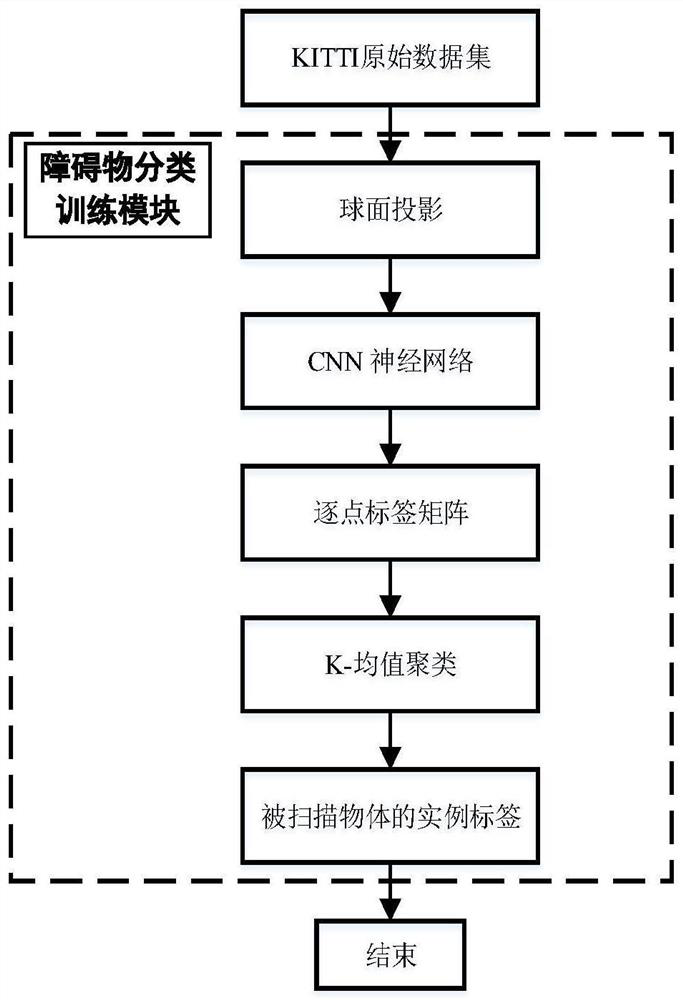
[0045] Specifically, it includes building a global map and completing the global path planning; training the obstacle classification module; driving the agricultural machinery according to the global path planning scheme, detecting obstacles on the driving path in real time, and using the trained obstacle classification module to detect obstacles on the driving path The detected obstacles are classified dynamically and statically, and local obstacle avoidance is performed immediately according...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More