Multi-constraint pneumatic deceleration control method for unmanned aerial vehicle
A technology of deceleration control and flight control, which is applied in the field of cruise missile flight control and unmanned aircraft, and achieves the effect of simple method and easy acquisition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described below in conjunction with the accompanying drawings.
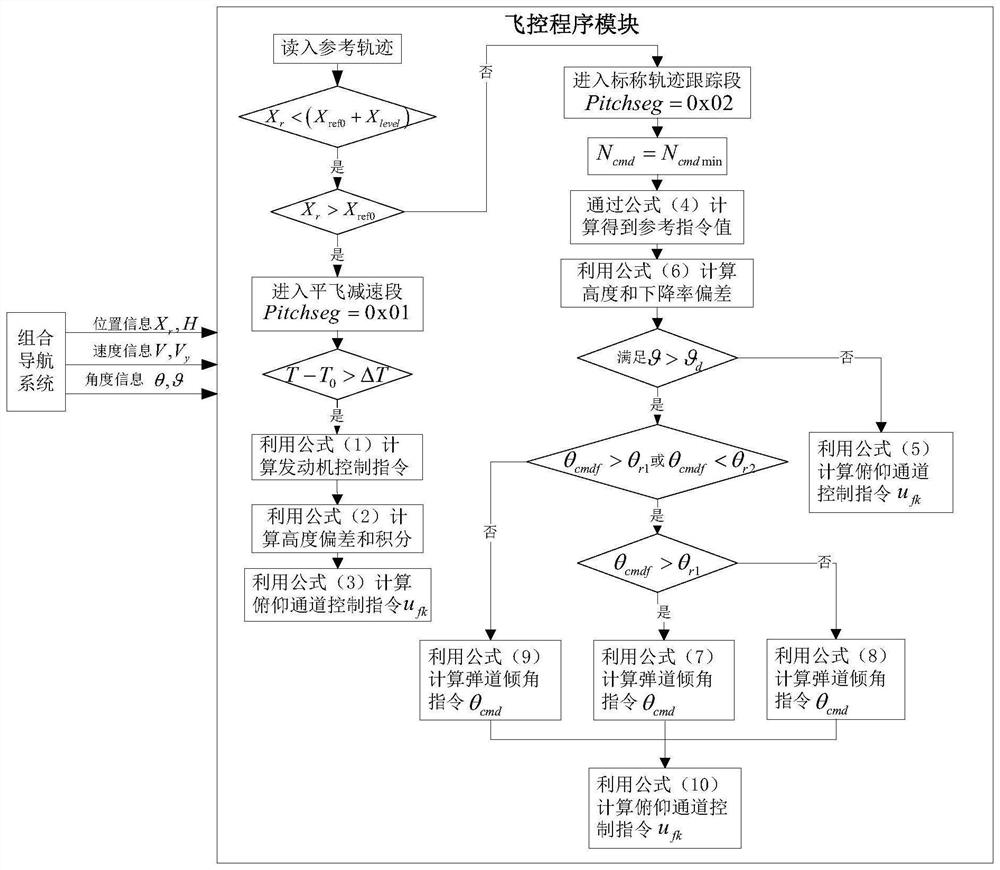
[0057] Such as figure 1 As shown, a multi-constraint rapid deceleration control method for an unmanned aerial vehicle disclosed in this embodiment is specifically implemented as follows:
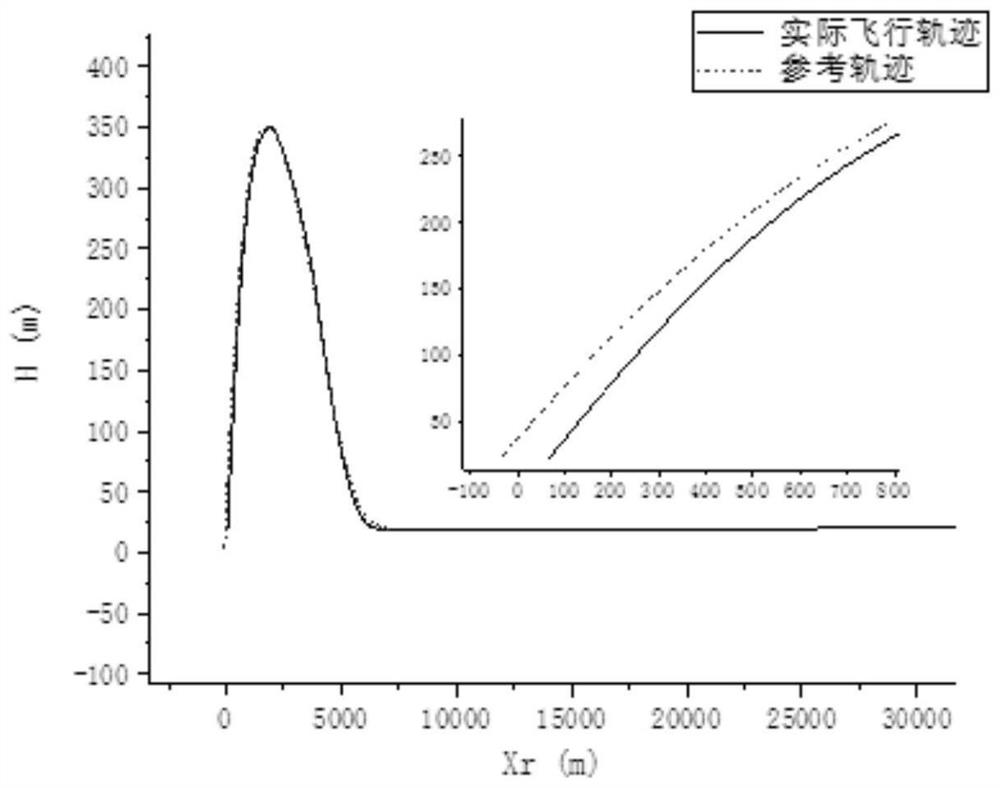
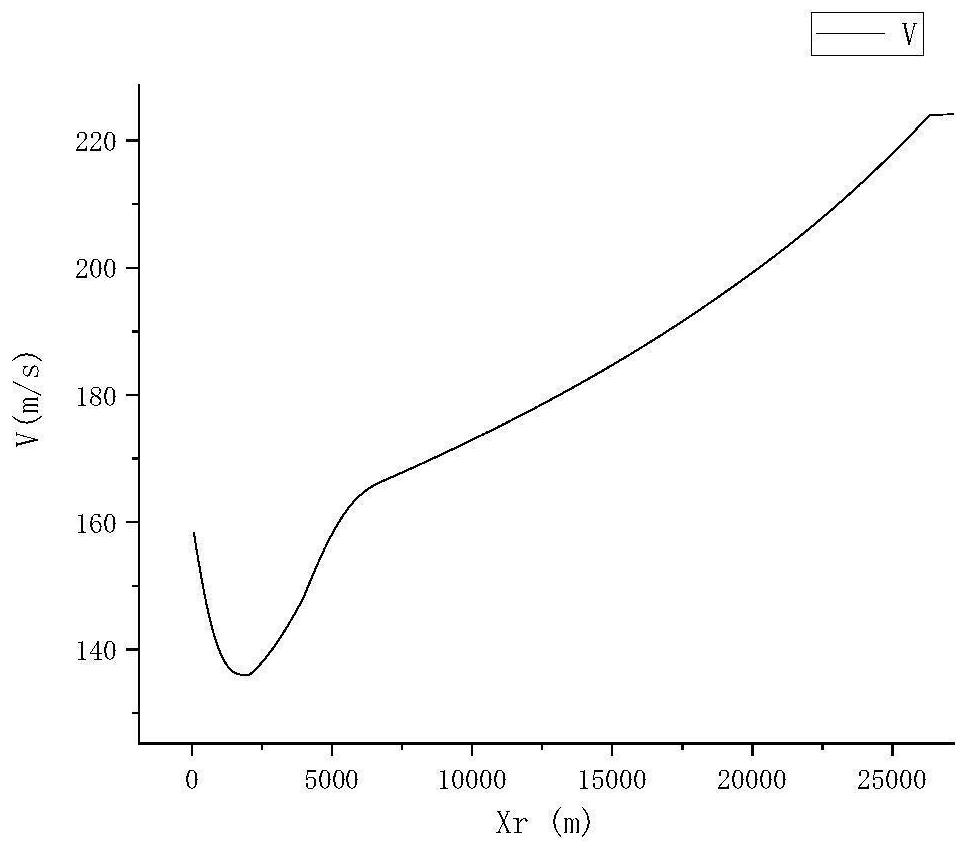
[0058] Step 1. The task of the unmanned aerial vehicle is to carry the underwater vehicle to the sea area beyond 400km. In order to prevent it from being detected by the radar on the enemy ship, the terminal adopts an ultra-low-altitude sea-skimming flight, and the cruising altitude is 20m above sea level. Cruising speed is V 0 =230m / s, due to the limitation of the structural strength of the underwater vehicle and the limitation of the angle of entry into the water, it is required that the unmanned aircraft launch the underwater vehicle at a height of 20m from the water surface, the horizontal position error is less than 200m, the terminal speed is less than 165m / s, and there is no ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More