

Spherical fruit picking robot and picking method
A picking robot and spherical technology, applied in the direction of picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of low degree of automation, low picking success rate, poor versatility, etc., achieving good versatility and high picking success rate. , the effect of reducing the space occupied
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The technical solution of the present invention will be clearly and completely described below in conjunction with the accompanying drawings, but this embodiment should not be construed as limiting the present invention.
[0052] The present invention as Figure 1 to Figure 10 Shown:
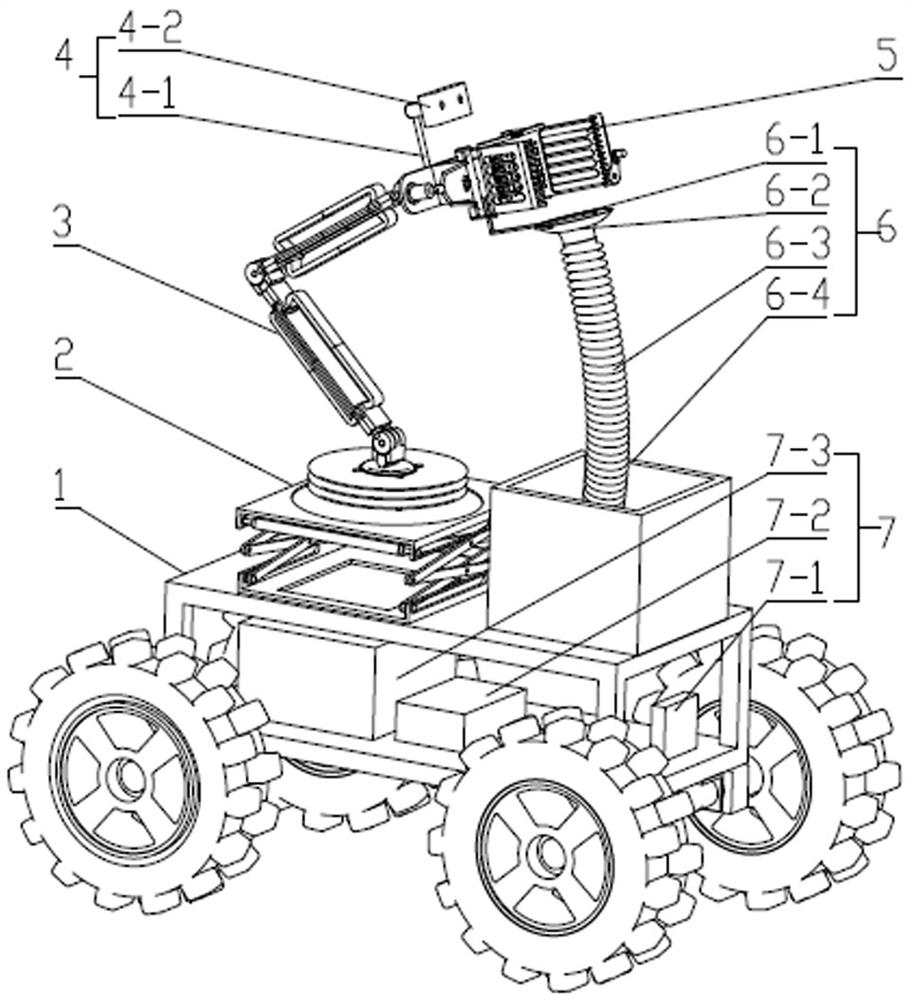
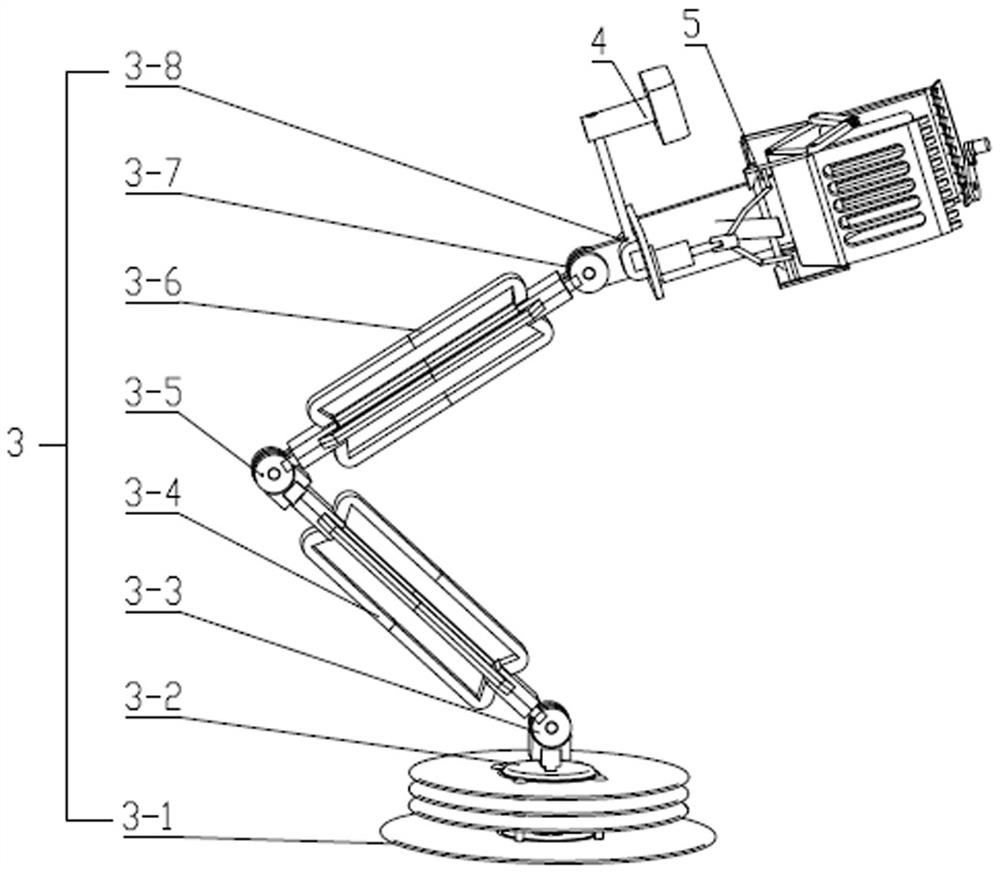
[0053] A spherical fruit picking robot, comprising a mobile trolley 1, the mobile trolley is an electric mobile trolley, an electric scissor lifting platform 2, a collection device 6 and a control device 7 are installed on the mobile trolley, and a mechanical arm is installed on the electric scissor lifting platform 2 3. A visual device 4 and an end effector 5 for grabbing fruit are installed on the robotic arm 3,
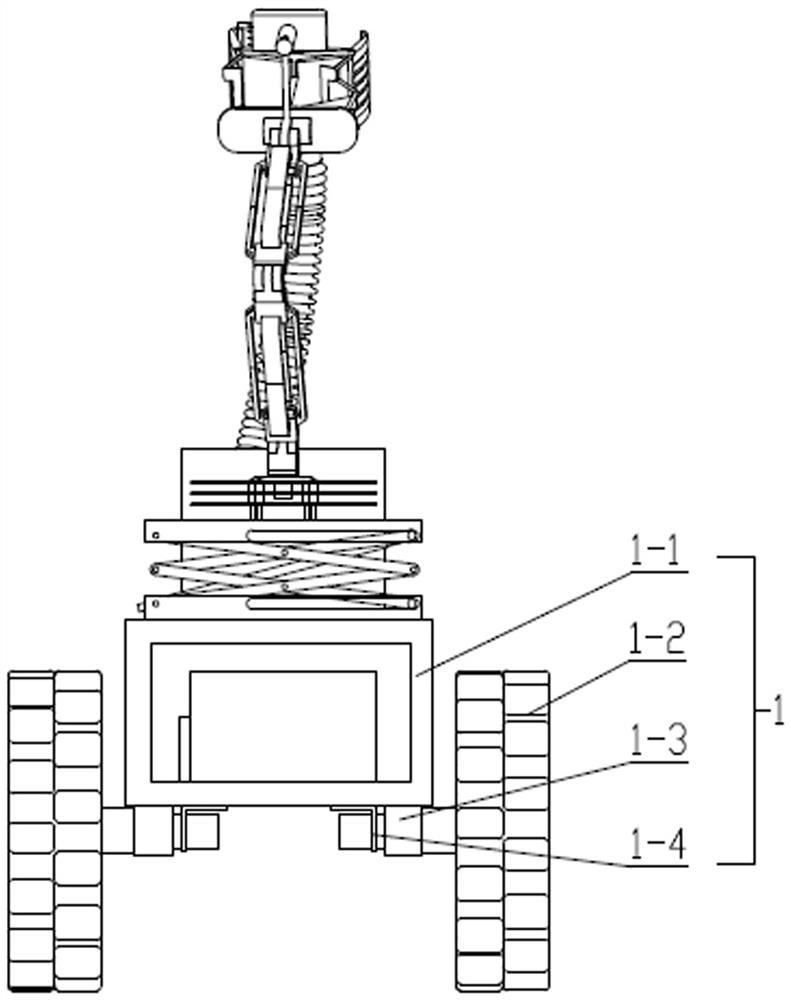
[0054] Such as figure 1 and figure 2 As shown: the mobile trolley 1 includes a double-layer frame 1-1, the control device 7 is arranged on the lower layer of the double-layer frame 1-1, and the electric scissor lift platform 2 and the collecting device 6 are arranged on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More