

Lotus claw for grabbing waste steel
A technology for steel and scrap, applied in the field of lotus grasping for scrap steel, it can solve the problems of not being able to achieve the maximum torque, limiting the grasping speed, and not extending the force arm, and achieves reduced force, fast running speed, and easy replacement. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
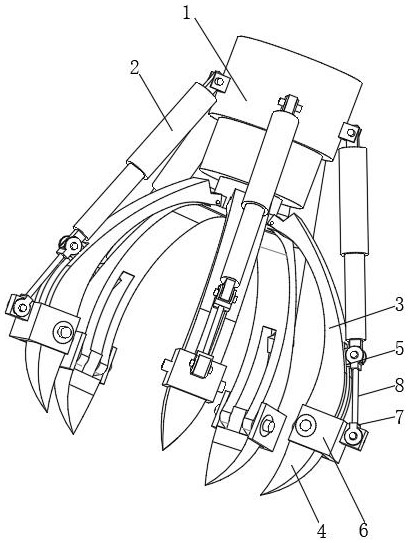
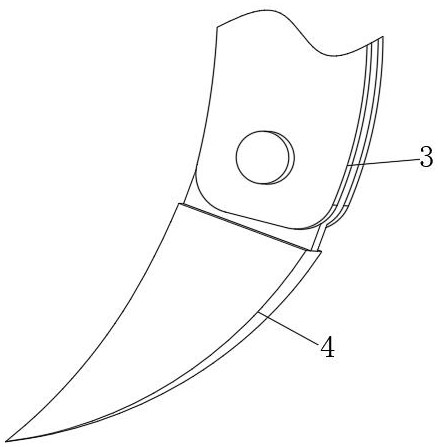
[0026] see figure 1 , a lotus grab used for grabbing scrap steel, including a connection platform 1 fixedly connected to a mechanical arm, a hydraulic rod 2 connected to a hydraulic device, and a grasping flap hinged to the connection platform 1, the connection platform 1 can be hung on a hook On the mechanical arm, it can also be fixedly connected with the mechanical arm through the flange. The grasping flap is composed of the upper flap 3 and the tip 4. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More