

Fault-tolerant flight control method for fixed-wing unmanned aerial vehicle in control surface stuck state
A flight control and rudder surface technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as strong jitter, large coupling, discomfort, etc., and achieve fast and more stable response and intervention , speed up convergence speed and accuracy, and improve performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The following description provides many different embodiments, or examples, for implementing various features of the invention. The elements and arrangements described in the following specific examples are only used to express the present invention in a concise manner, and are only used as examples rather than limiting the present invention.
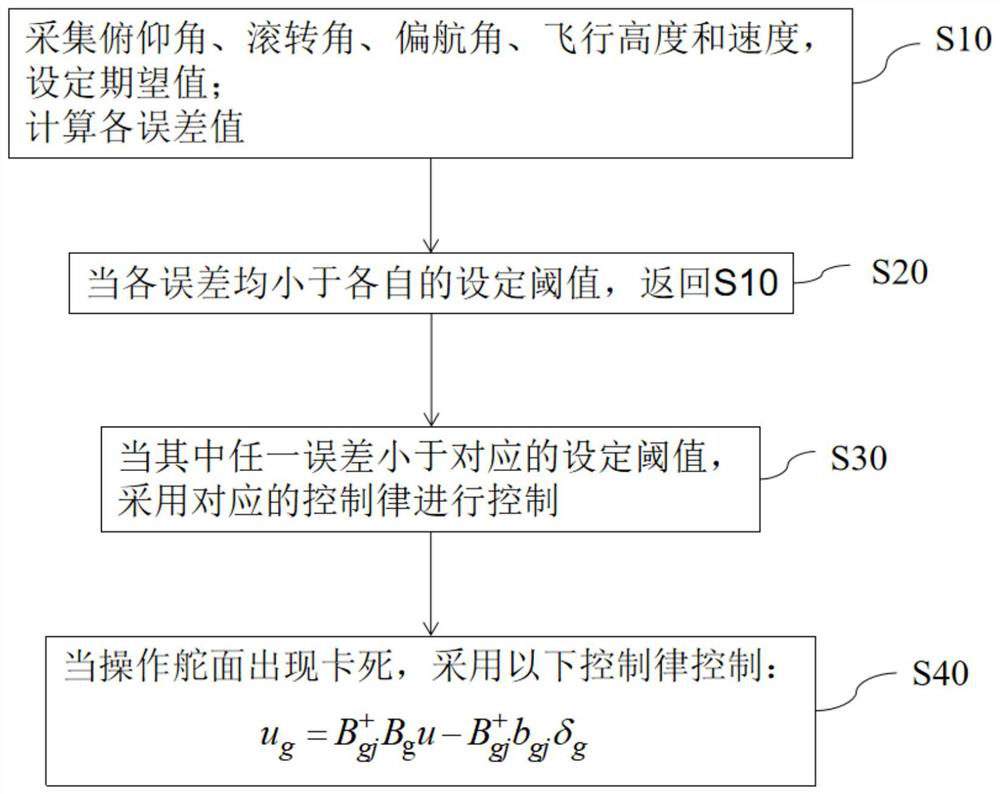
[0063] A fault-tolerant flight control method for a fixed-wing unmanned aerial vehicle under the stuck state of the rudder surface, such as figure 1 shown, including the following steps:
[0064] S10. Collect the pitch angle θ, roll angle φ, yaw angle ψ, flight height h and speed V (speed of the drone relative to the air) of the UAV; set the expected value: desired pitch angle θ d , desired roll angle φ d , expected yaw angle ψ d , expected flying height h d and the desired speed V d , to calculate the pitch angle error e θ , roll angle error e φ , yaw angle error e ψ , flight height error e h and speed error e V :
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More