

Shock absorption type robot gripper device with self-adjustment function
A robotic gripper and self-adjusting technology, applied in manipulators, manufacturing tools, chucks, etc., can solve the problems of unreliable clamping, low reliability, and no absorption, and achieve the effects of convenient operation, improved use range and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] Below in conjunction with accompanying drawing and embodiment the patent of the present invention is described further.
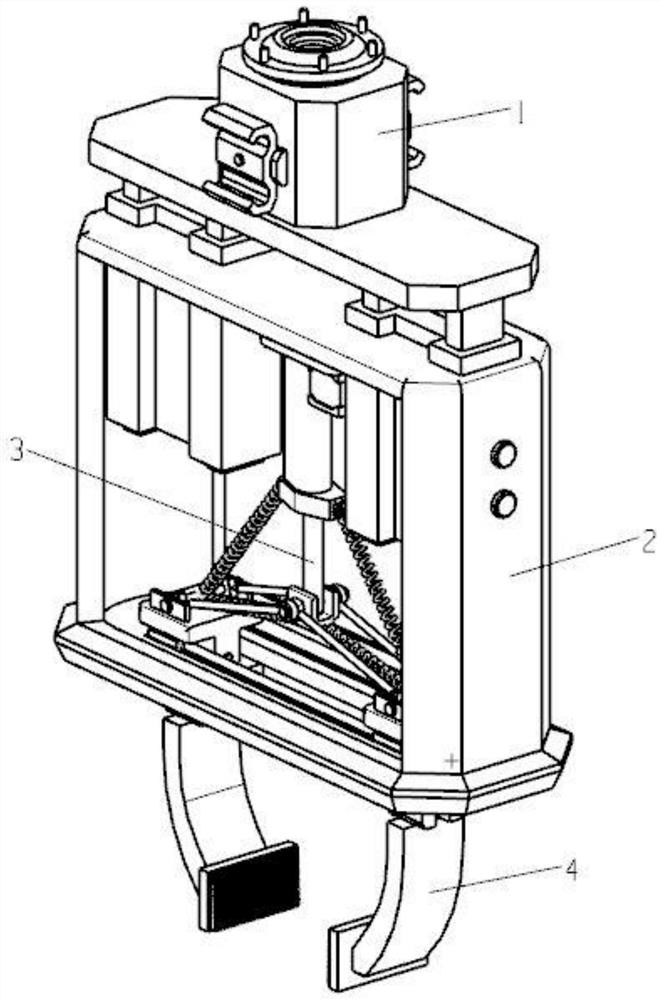
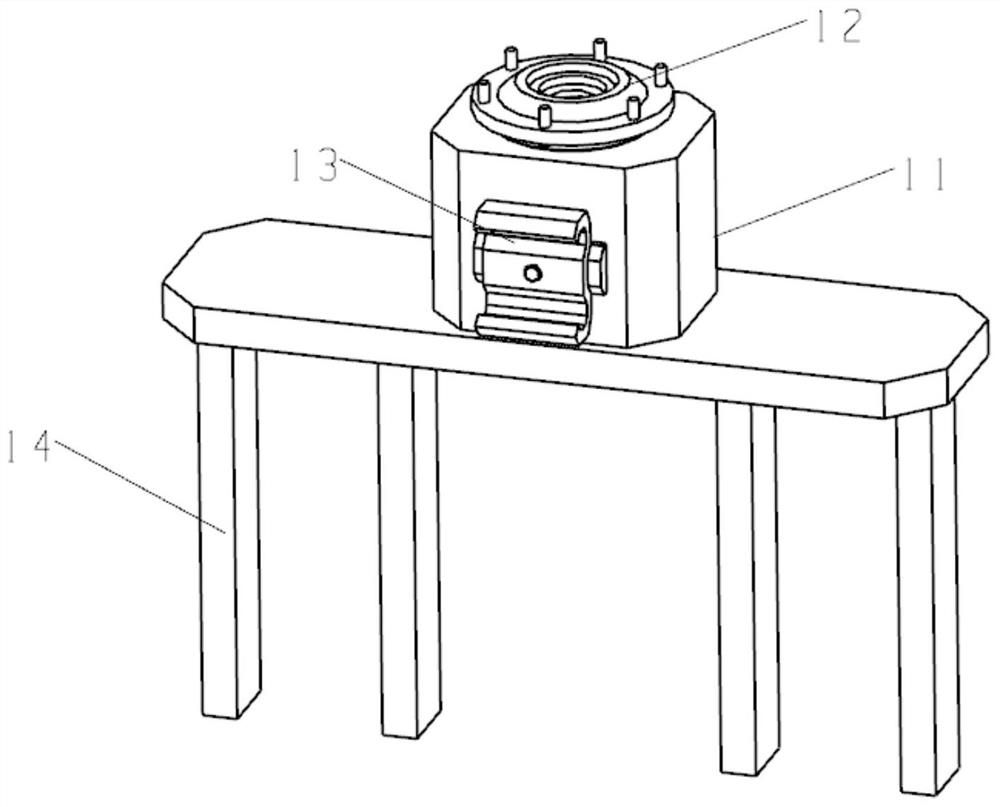
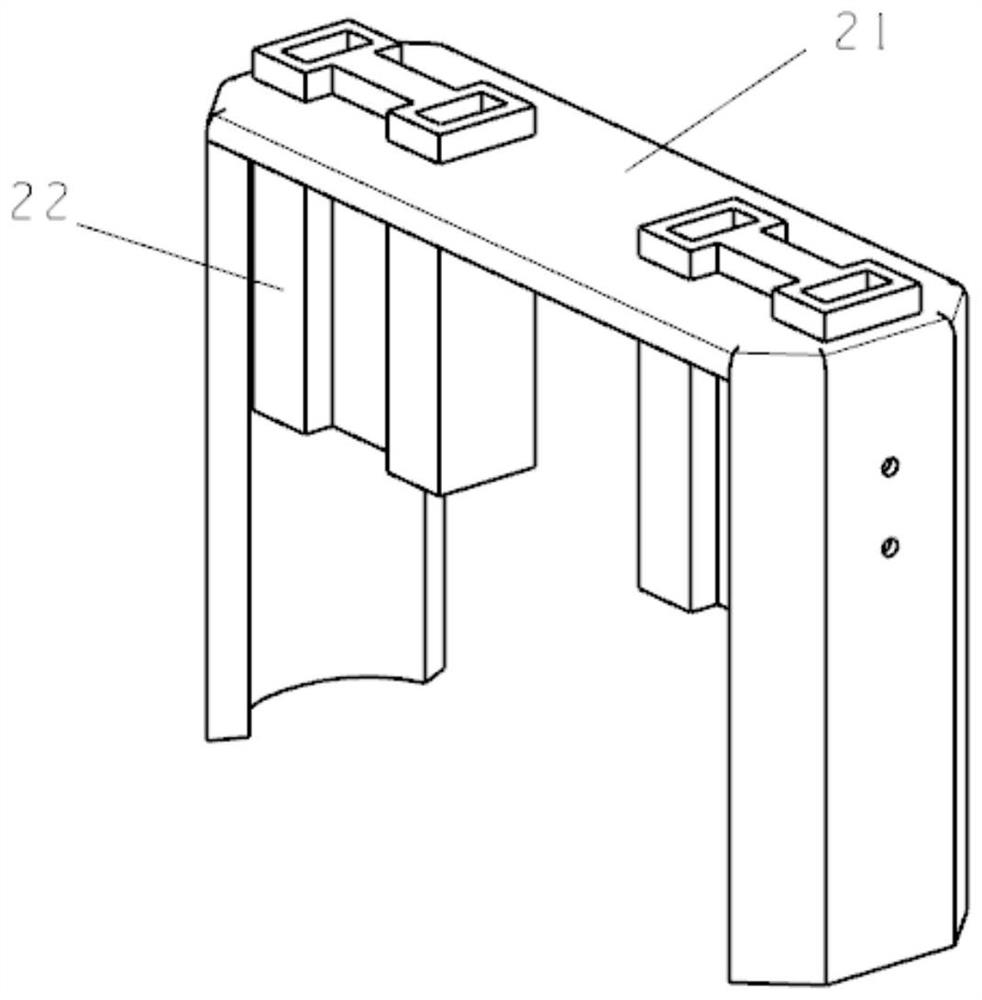
[0014] Referring to the accompanying drawings, a self-adjusting shock-absorbing robot gripper device includes: top connection device module 1; top frame 11; top suspension rail connection ring 12; side rail connection buckle 13; lifting guide rail 14; chassis module 2 ; Case skeleton 21; Lifting mechanism 22; Running device module 3; Motor 31; Electric push rod 32; Chassis chassis 33; Block 37; Second-stage spring 38; Grabbing device module 4; Grabbing pliers package lower connection block 41; Grabbing pliers 42; Wherein, top connecting device module 1 includes top hanging rail connecting ring 12, side track connecting buckle 13, lifting Guide rail 14; chassis module 2 includes chassis frame 21, lifting mechanism 22; operating device module 3 includes motor 31, electric push rod 32, chassis chassis 33, gripper package upper connection block 34, first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More