

Multi-line laser sensing closed layout structure, scanning splicing method and gluing scanning method
A multi-line laser, layout structure technology, applied in the direction of using optical devices, instruments, measuring devices, etc., can solve the problems of high degree of freedom of equipment, spatial interference, complex programming, etc., to achieve the effect of convenient implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in further detail below in conjunction with accompanying drawing:
[0048] Figure 4 , Figure 5 A glue-scanning embodiment of the invention using a six-axis industrial robot is shown.
[0049] see Figure 4 As shown, the gluing scanning method comprises the following steps:
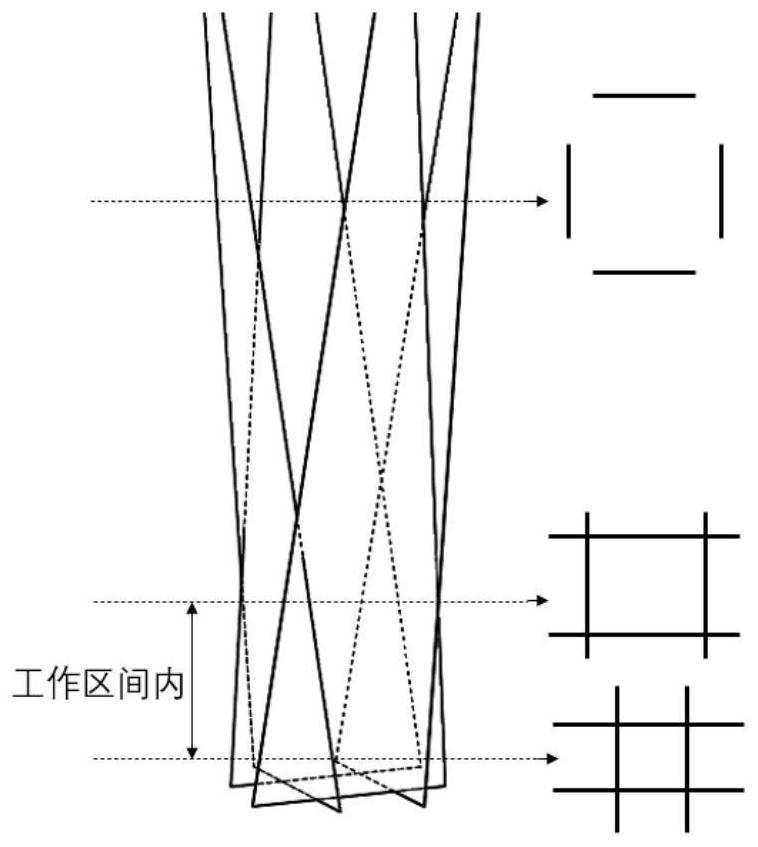
[0050] ⑴ Make the mounting parts, and install the four calibrated line laser sensors evenly to form a closed quadrilateral;
[0051] ⑵Install the mounting parts to the end of the robot, complete the hand-eye matrix calibration of each line laser and the end of the robot, use the standard sphere calibration method, move the robot end posture respectively, move the laser line to the standard sphere, and take 20 poses for each sensor , record the sensing data and robot attitude data, and calculate simultaneously to obtain the sensing hand-eye matrix T n ;
[0052] ⑶ Along the trajectory of the glue road, the end of the translation is programmed to write t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More