

A Path Planning Method for Mobile Robots Based on Image Processing
A mobile robot and path planning technology, applied in the field of intelligent robots, can solve problems such as inability to guarantee collisions and poor flexibility, and achieve the effects of ensuring motion safety, improving operating efficiency, and simple methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
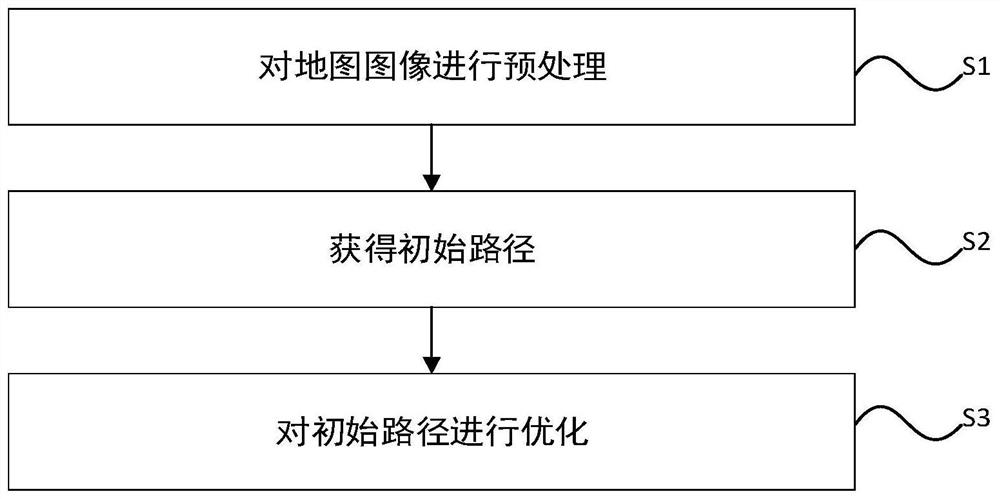
[0069] Every pixel in the map image can participate in the operation, resulting in a huge amount of data and low efficiency of the algorithm. At the same time, considering the external geometric features of the mobile robot to avoid collision with objects in the surrounding environment during the movement, it is necessary to preprocess the image to obtain a safe reference path map.
[0070] The embodiment of the present invention dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More