DeeplabV3 +-based instant positioning and mapping method for obstacles in unfamiliar sea area
A technology of map construction and obstacles, applied in the field of unmanned boats, can solve the problems of high false alarm rate, long baseline stability, poor matching accuracy, etc., and achieve the effect of optimizing training results, enriching diversity, and quickly separating and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
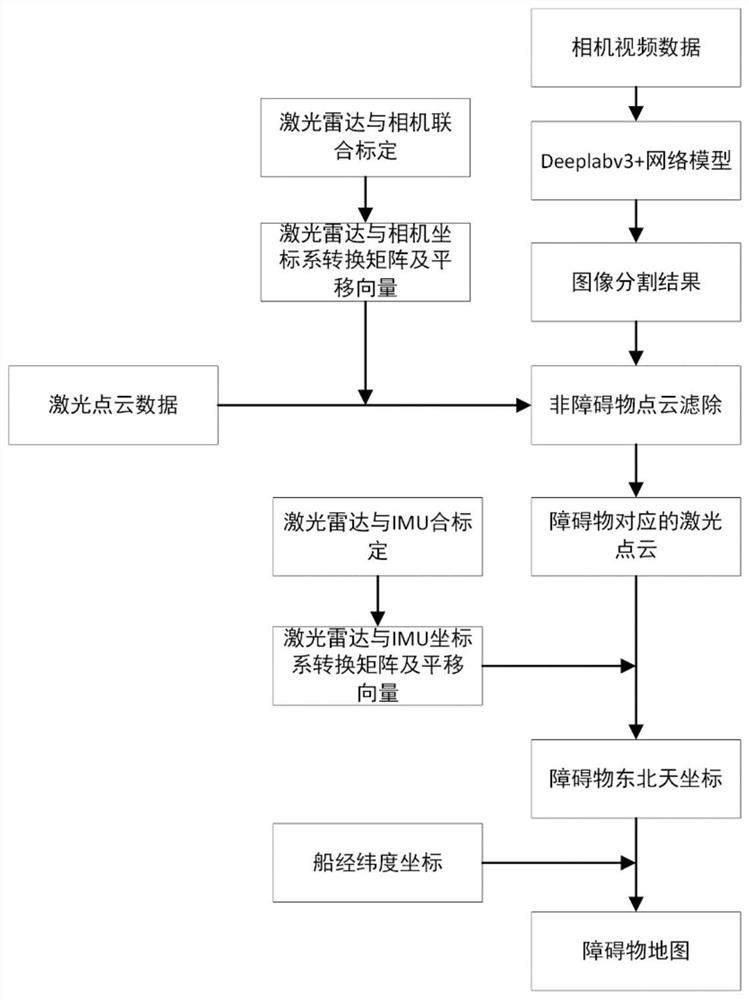
[0081] Such as figure 1 As shown, the implementation steps of a DeeplabV3+-based real-time obstacle location and map construction method in unfamiliar sea areas are as follows:
[0082] A. Through the joint calibration of lidar and visible light camera, the conversion relationship between the lidar coordinate system and the visible light camera coordinate system is obtained, that is, the rotation matrix and translation vector from the lidar coordinate system to the visible light camera coordinate system;
[0083] Use the checkerboard calibration board with white edges to calibrate the camera to obtain the internal parameters of the camera; prepare a checkerboard calibration board with no white edges on the edge, set the acquisition frequency of the lidar and the visible light camera to 10HZ, use the ros The rosbag command synchronously collects the checkerboard data of the visible light camera and the lidar; uses the corner point extraction algorithm to extract the coordinates...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com