

Bionic robot, system and method based on series-parallel hybrid pneumatic muscles and air cylinders
A bionic robot and pneumatic muscle technology, applied in the field of bionic robots, can solve the problems of small movement range of pneumatic muscles and large cylinder stiffness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
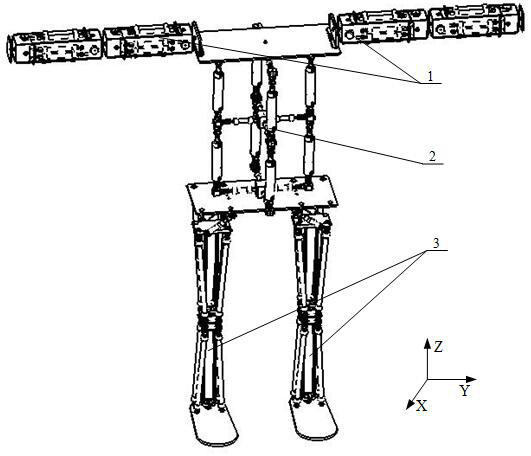
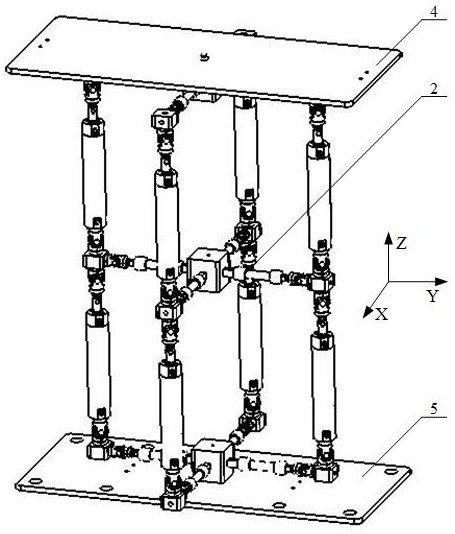
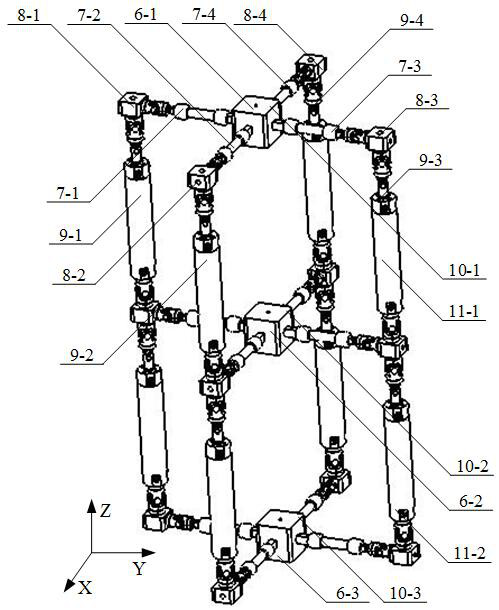
[0042] Embodiment 1: as figure 1 , 2 , 3, 4, 5, 6, 7, and 8, the bionic robot based on serial-parallel hybrid pneumatic muscles and cylinders of the present invention includes: upper limb joint system 1, waist joint system 2, lower limb joint system 3, left lower limb 3- 1. Right lower limb 3-2, upper end plate of lumbar joint 4, lower end plate of lumbar joint 5, upper middle module 6-1, middle middle module 6-2, lower middle module 6-3, waist joint pneumatic muscle one 7-1, Lumbar joint pneumatic muscle two 7-2, waist joint pneumatic muscle three 7-3, waist joint pneumatic muscle four 7-4, branch connection module one 8-1, branch connection module two 8-2, branch connection module three 8-3, branch connection module four 8-4, waist joint cylinder one 9-1, waist joint cylinder two 9-2, waist joint cylinder three 9-3, waist joint cylinder four 9-4, waist joint upper layer 10- 1. The middle layer of the waist joint 10-2, the lower layer of the waist joint 10-3, the first int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More