

Civil aviation navigation equipment sight distance coverage analysis method combined with flight path variable height
A technology of flight trajectory and navigation equipment, applied in the field of line-of-sight coverage analysis of civil aviation navigation equipment combined with flight trajectory variable height, can solve problems such as inability to guarantee flight safety, and achieve the effect of ensuring flight safety, ingenious conception, and scientific design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0133] as attached Figure 5 As shown, the present invention provides an example of an airport applying the method of the present invention to carry out line-of-sight coverage analysis, specifically comprising the following steps:
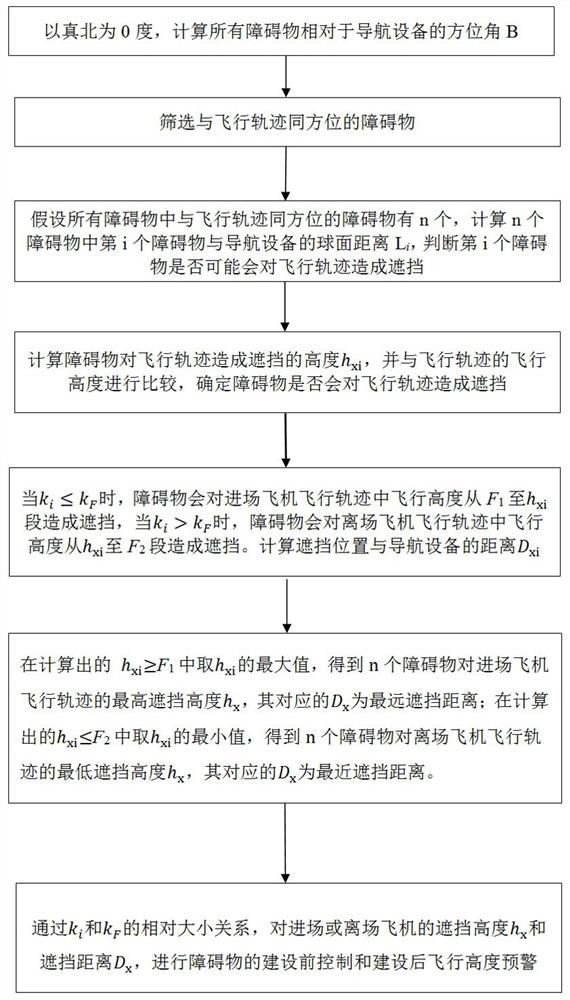
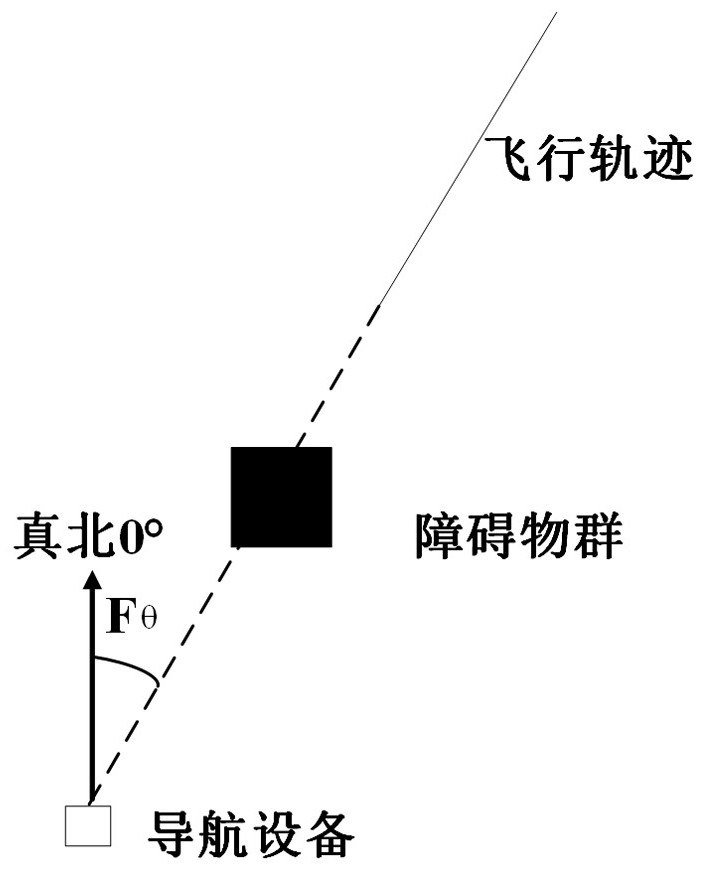
[0134] S1. Taking true north as 0 degrees, calculate the azimuth angle B of all obstacles relative to the navigation equipment, unit °;
[0135] In the S1, the calculation formula of the azimuth B is:
[0136] B=90-A+360×T (1)
[0137] T=A / 360, rounded down (2)
[0138] A=atan2(x,y) , converted into angle (3)
[0139] x = sin( O j - N j ) ×cos( O w ) (4)
[0140] y = cos( N w )×sin( O w )- sin( N w ) ×cos( O w ) ×cos( O j - N j ) (5)
[0141] in,( O w , O j ): the coordinates of the obstacle, where, O w is the latitude, O j is the longitude;
[0142] ( N w , N j ) coordinates of the navigation device, where, N w is the latitude, N j is the longitude.
[0143] S2. Screen the obstacles with the same orientatio...
example 1
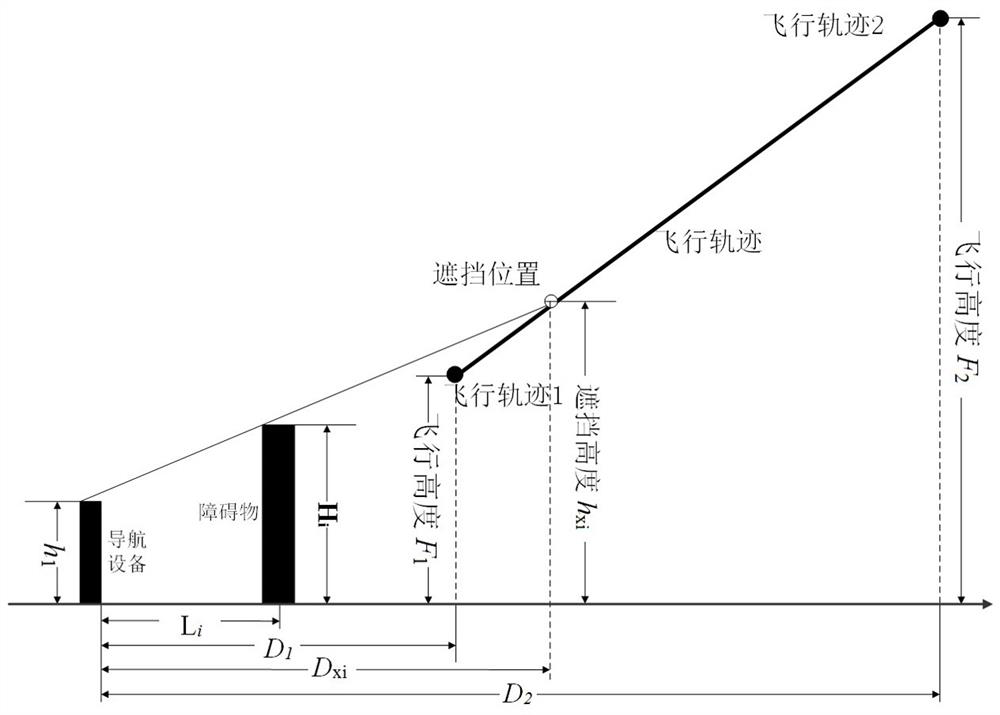
[0192] Example 1: Fθ=20°, h 1 = 100 meters, H i =250 meters, F 1 =300 meters, D 1 =2500m, F 2 =900 meters, D 2 =6000m.
[0193] 1. Since the obstacle has a width, the azimuth range between the obstacle and true north is calculated according to the boundary of the obstacle. After calculation, the azimuth angles formed by the left and right boundaries of the obstacle and the true north are 11.90° and 21.5° respectively, so the azimuth angle range of the obstacle is 11.9°~21.5°.
[0194]2. Fθ is located within the range of obstacle azimuth 11.9°~21.5°, therefore, the obstacle is in the same orientation as the flight path.
[0195] 3. After calculation, the shortest distance L between the left and right boundaries of the obstacle and the navigation equipment i =1508m.
[0196] Satisfy 0i D 2 , so it may cause obstruction to the flight path.
[0197] 4. After calculation, k i =0.1, k F =0.17, k i k F , h xi = 416 meters, therefore, h xi > F 1 , obstacles...
example 2
[0200] Example 2: Fθ=20°, h 1 = 100 meters, H i = 400 meters, F 1 =600 meters, D 1 =2000m, F 2 =900 meters, D 2 =6000m.
[0201] Since the azimuth angle formed by the connection line between the flight track and the navigation equipment and the true north is Fθ, the obstacle coordinates ( O w , O j ) and navaid coordinates ( N w , N j ) has not changed, therefore, the calculation process of judging whether an obstacle may block the flight path in the first three steps is the same as that of Example 1, so it will not be repeated, and the calculation will start from step 4 below.
[0202] 4. After calculation, k i =0.20, k F =0.075, k i > k F , h xi = 661 meters, therefore, h xi F 2 , obstacles will block the flight path from 661 meters to 900 meters, marked as a dotted line, and 600 meters to 661 meters will not cause obstruction, marked as a solid line.
[0203] 5. After calculation, the distance between the occlusion position and the navigation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More