

Flexible mechanical arm system high-order sliding mode anti-interference control method
A flexible manipulator and control method technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of sliding mode control estimation, inaccurate modeling, and the control effect is difficult to meet the control requirements, so as to reduce workload, The effect of reducing volatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to better understand the technical features of the present invention, the technical content and the technical effects achieved, the embodiments of the present invention are described in detail below with reference to the accompanying drawings: The present invention provides a high-order sliding mode anti-interference of a flexible robotic arm system For the control method, a single-axis flexible joint robotic arm will be taken as an example to give a detailed implementation manner and a specific implementation process, but the protection scope of the present invention is not limited to the following examples.
[0040] step one:
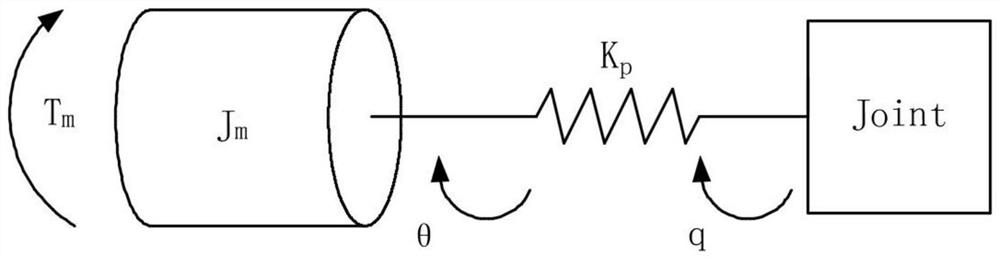
[0041] like figure 1 As shown in the structure diagram of the single-joint flexible manipulator, the flexible joint is first approximated as a linear spring, and the dynamic model of the flexible manipulator system is established according to the Lagrangian method, and the dynamic model of the single-axis flexible manipulator system is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More