Brain-computer interface robot motion control method
A technology of robot movement and brain-computer interface, applied to instruments, manipulators, manufacturing tools, etc., can solve problems such as error-prone and complex conversion processes, and achieve the effect of improving accuracy, real-time performance, and large performance advantages
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with accompanying drawing, the present invention is described further below:
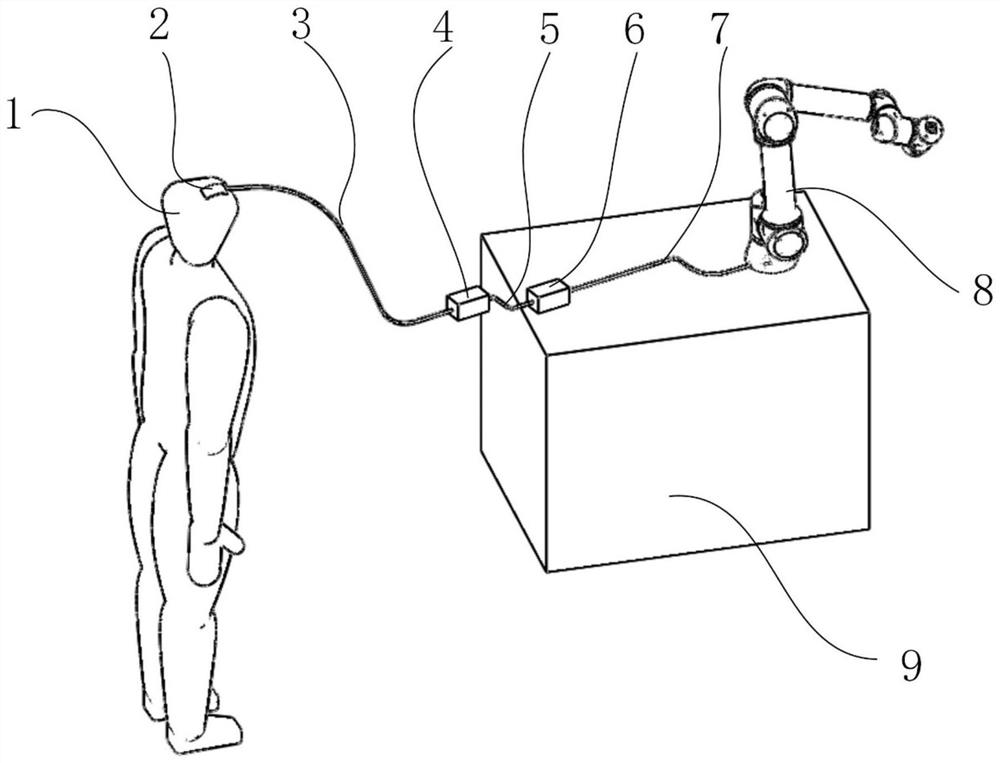
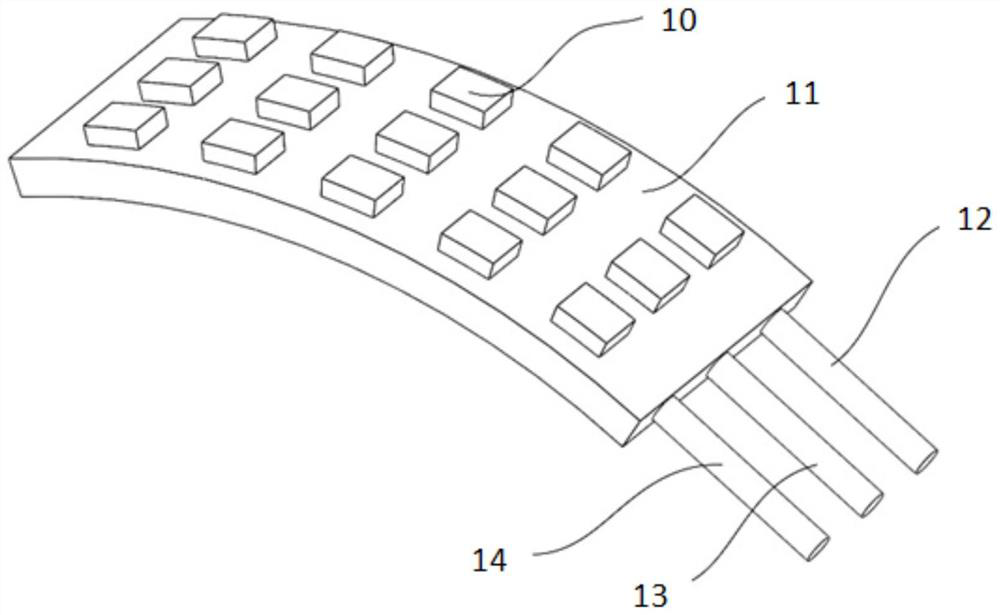
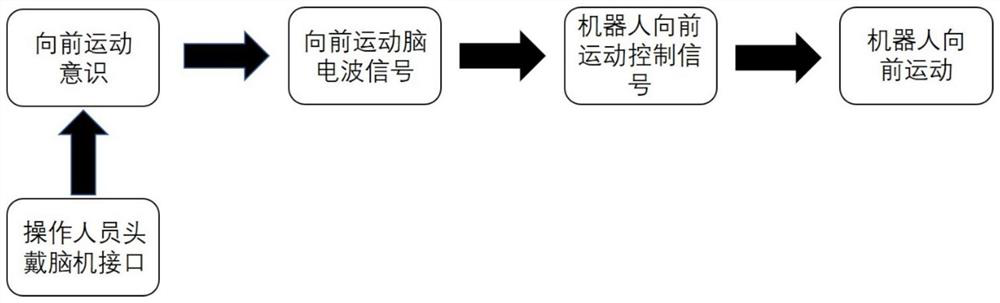
[0021] as attached figure 1 to the attached Figure 4 As shown in the figure, the present invention provides a control method that can directly convert the target position of the robot that the operator needs to obtain in the consciousness into the target position that the robot can recognize, specifically a method of controlling the movement of the robot through brain-computer interface technology The method includes the following steps: firstly, wearing a brain-computer interface device 2 on the head of the operator 1, then connecting the brain-computer interface device 2 to the robot body 8 through the robot motion control system, and the brain-computer interface device 2 is used to collect the human brain to the robot. After the command signal of the movement direction of the body 8 is filtered and identified by the robot motion control system, the movement command o...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap