

Tower crane anti-swing control method based on fixed time disturbance estimation
A fixed time, control method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of system uncertainty and external interference, slow convergence speed, unreasonable assumptions, etc., to avoid singularity Sexual problems, the effect of improving the convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0093] In order to make the object of the present invention, the technical solution and advantages more clearly understood, the following in conjunction with the accompanying drawings and embodiments, the present invention will be further elaborated in detail. It should be understood that the specific embodiments described herein are only used to explain the present invention and are not intended to qualify the present invention.
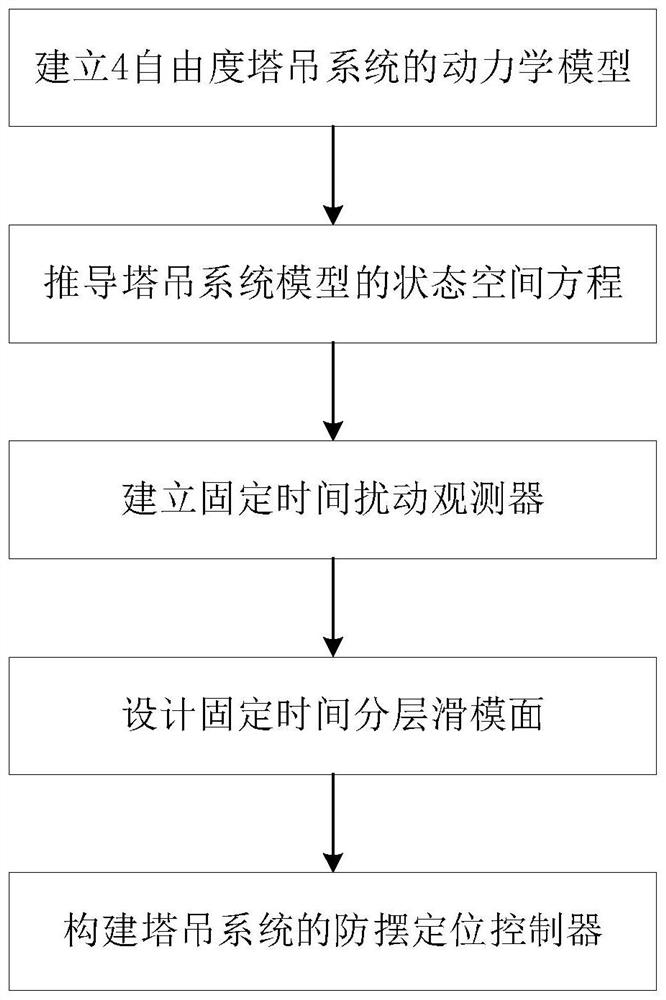
[0094] combine Figure 1 , a tower crane anti-swing control method based on fixed time disturbance estimation, including the following steps:
[0095] Step 1: Construct a dynamic model of the 4-degree-of-freedom tower crane system according to the parameters of the tower crane system, and transform it into the state space equation of the tower crane system, specifically:
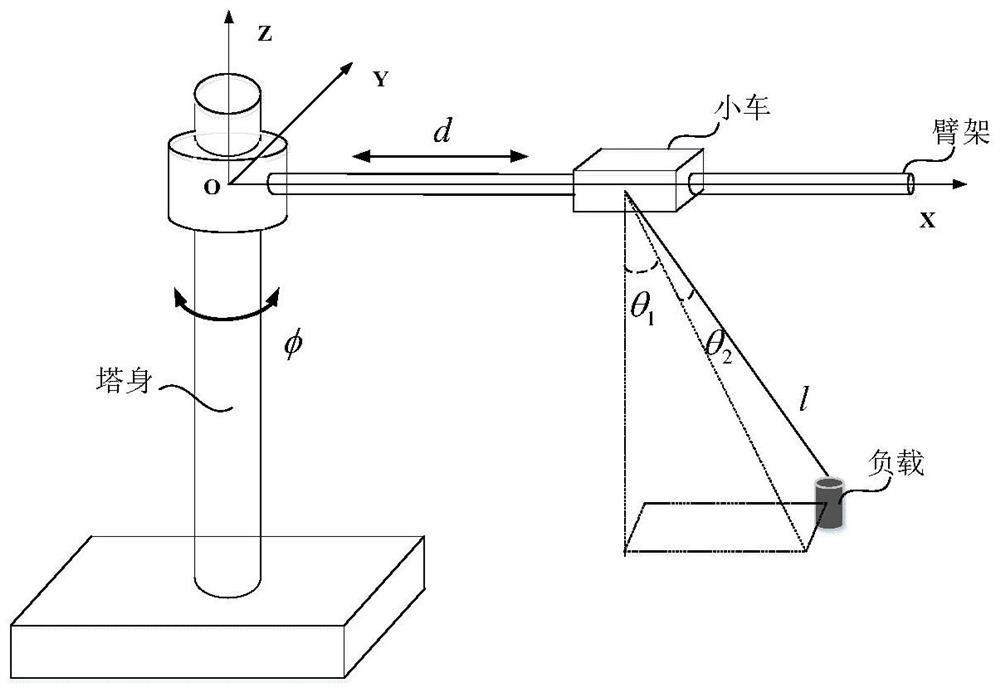
[0096] Steps 1-1: Binding Figure 2 Based on euler-Lagrange modeling method, a dynamic model of a 4-degree-of-freedom tower crane is constructed:
[0097]
[0098]
[0099] where M t ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More