Non-contact underground pipeline two-dimensional millimeter-level settlement real-time monitoring method
An underground pipeline, real-time monitoring technology, applied in the direction of climate sustainability, instruments, height/level measurement, etc., can solve the problems of monitoring data distortion, inability to real-time monitoring, low measurement accuracy, etc., to achieve low cost and high stability. , The effect of high monitoring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
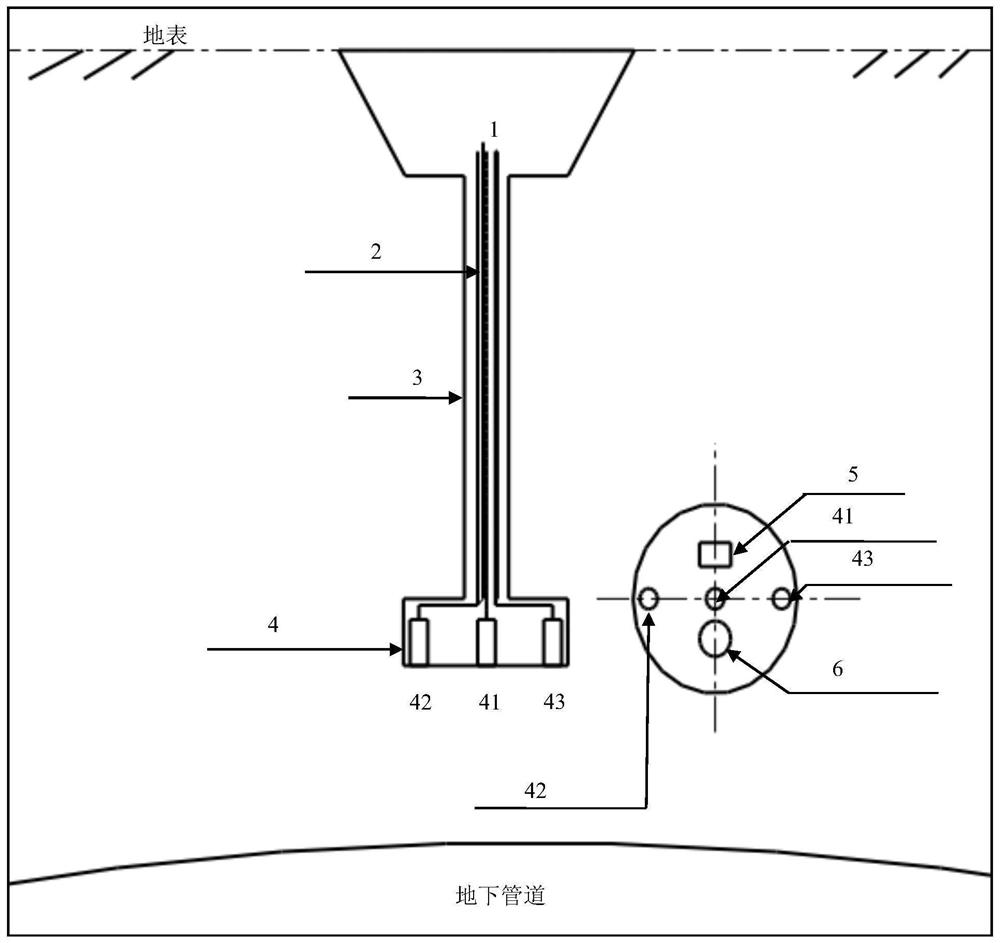
[0059] refer to figure 1 , The non-contact underground pipeline two-dimensional millimeter-level settlement real-time monitoring system includes sensor array probes, connecting rods 3, underground sound velocity vertical distribution real-time monitoring devices, base 1, wireless transmission and monitoring terminals. The sensor array probe is used as the main detection unit, including three ultrasonic ranging sensors (41, 42, 43), one acceleration sensor 6 and one inclination sensor 5. The sensing surfaces of the three ultrasonic ranging sensors face downward. The first ultrasonic ranging sensor 41 obtains the distance between the probe and the underground pipeline in the vertical direction in real time, and ΔD1i is the settlement value of the underground pipeline in the vertical direction; the monitoring terminal includes a foreign object extrusion and intrusion identification module, surface vibration correction module and tilt correction module.
[0060] The second ultras...
Embodiment 2
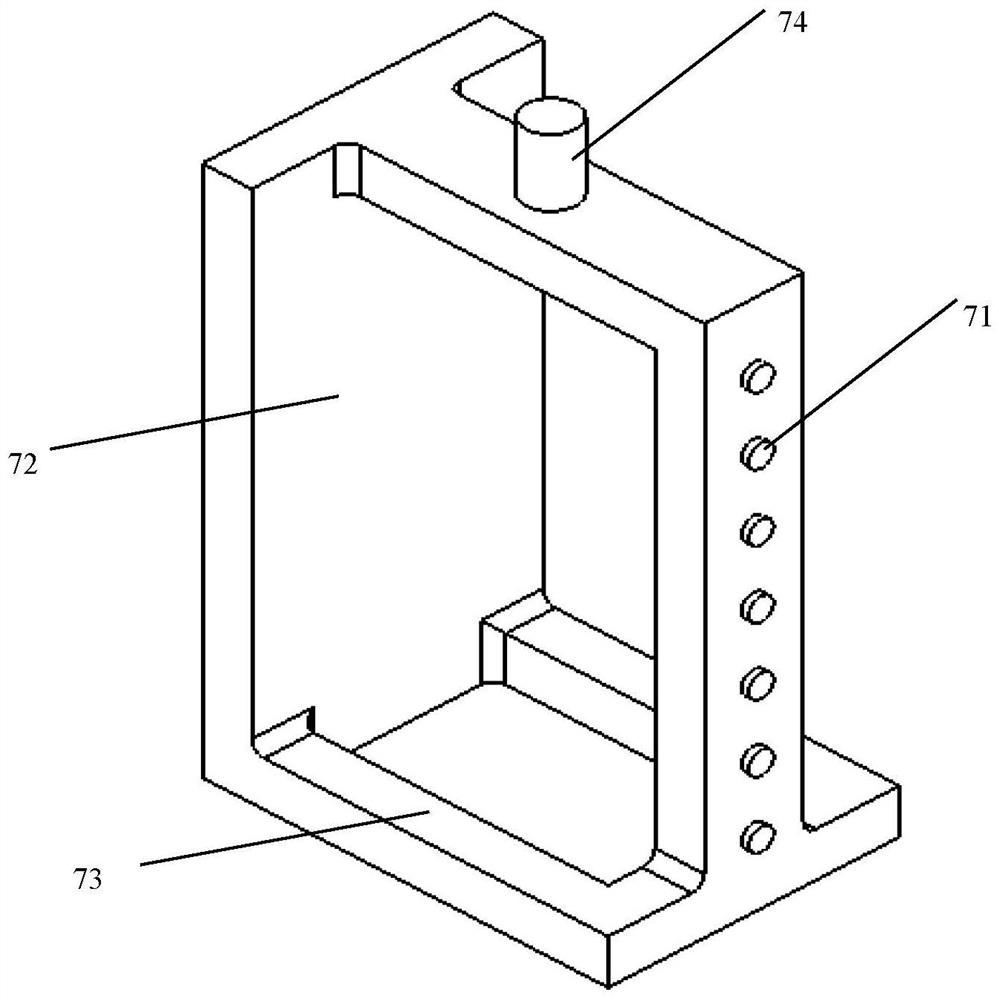
[0075] refer to figure 2 , the underground sound velocity vertical distribution real-time monitoring device, divided into left and right parts, the right side is installed a series of high-precision ultrasonic ranging sensors 71 at different heights from top to bottom to form an array sensor, the left is an ultrasonic reflection plate 72, ultrasonic reflection plate The distance L between 72 and the array sensor is a fixed value.
[0076] Dig a vertical hole in the roadside, flower bed and other places where holes are easy to be opened, put the device into the soil, adjust the ultrasonic reflector 72 and the array sensor to the vertical direction, fill the soil, and compact.
[0077] V=2L / T, T is the ultrasonic round-trip time, which is measured by each ultrasonic sensor, and then the real-time propagation rate of ultrasonic waves at different depths can be calculated.
[0078] The real-time corresponding function of velocity V and depth is obtained: y=V(x).
[0079] The re...
Embodiment 3
[0084] Embodiment 3 Simultaneous monitoring method for horizontal displacement and vertical displacement of pipeline
[0085] 3.1 Displacement algorithm when only vertical settlement
[0086] Horizontal displacement: △x=0;
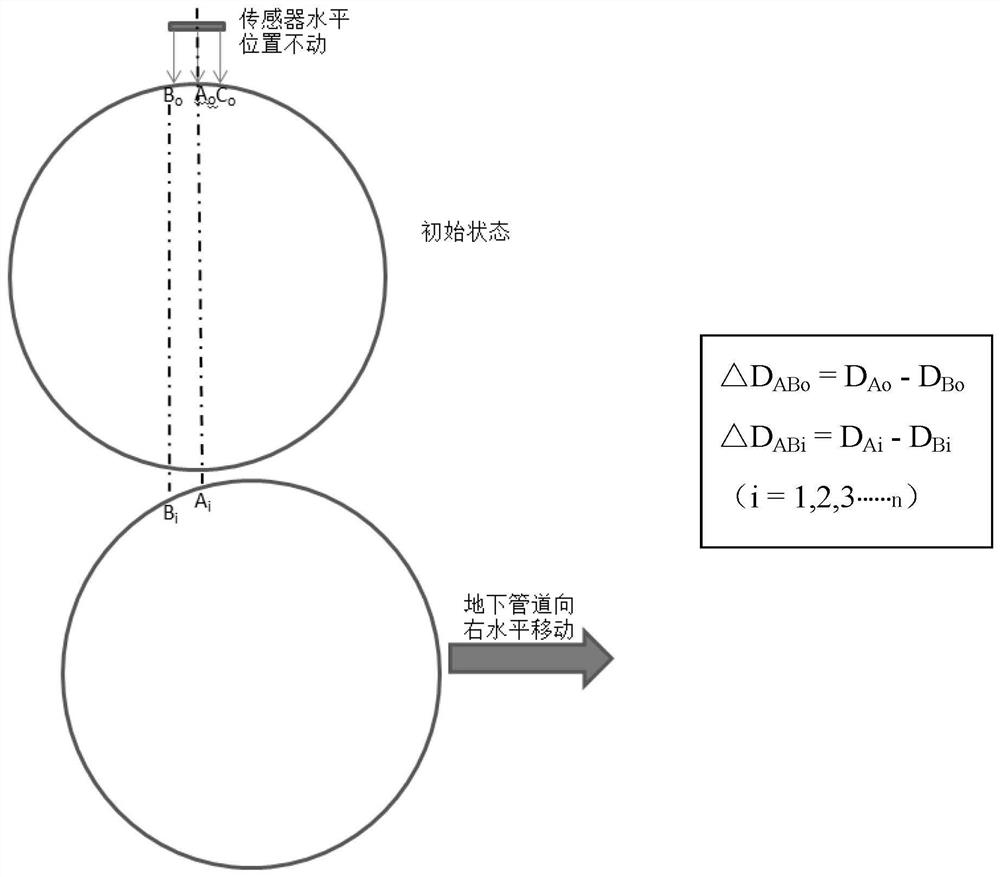
[0087] Vertical displacement: △D i =D Ai -D Ao =D Bi -D Bo =D Ci -D Co .
[0088] A, B and C are the positions where the ultrasonic waves emitted by the three sensors (the first, second and third ultrasonic ranging sensors 41, 42 and 43) hit the underground pipeline respectively, D Ao , D Bo , D Co They are the vertical distances between the three sensors and A, B, and C after the equipment has just been debugged, D Ai , D Bi , D Ci are the vertical distances between the three sensors and A, B, and C, which are monitored in real time during the monitoring process.
[0089] 3.2 The necessity of horizontal displacement monitoring
[0090] Necessity of monitoring: (1) During the settlement process of the pipeline, a small amount of horizontal d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



