

Method for simultaneously realizing underwater acoustic positioning and navigation parameter telemetering for UUV (Unmanned Underwater Vehicle)
A technology of underwater acoustic positioning and parameters, applied in positioning, measuring devices, radio wave measuring systems, etc., to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
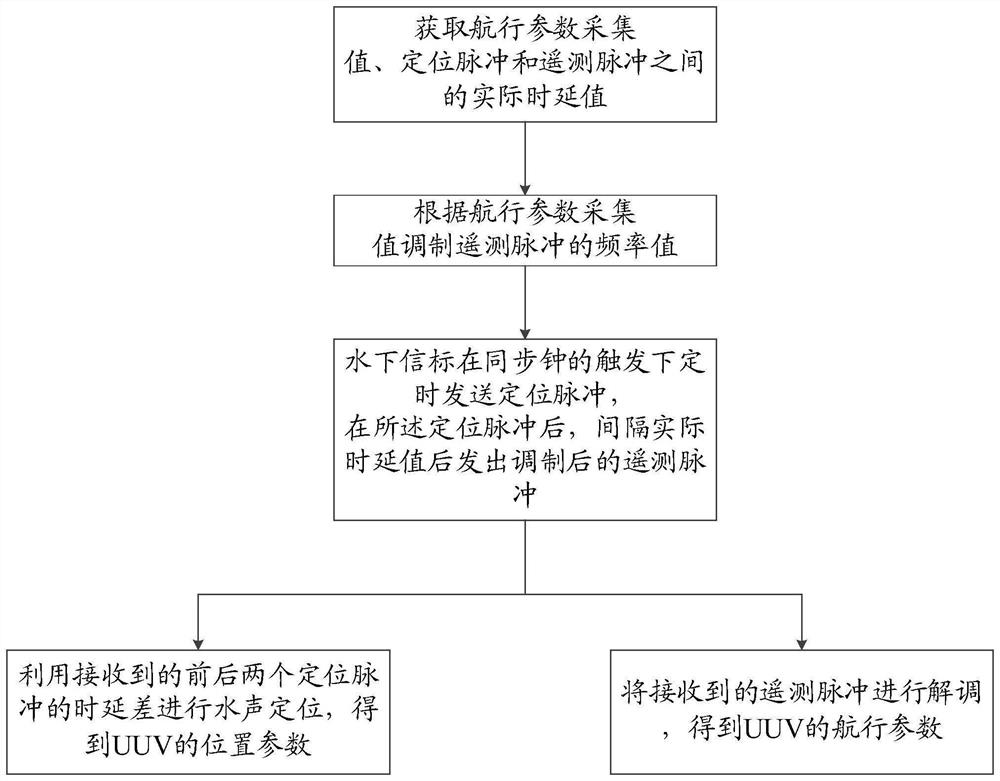
[0030] like figure 1 As shown, the present invention provides a method for simultaneously realizing underwater acoustic positioning and navigation parameter telemetry for UUV, including the following steps:
[0031] Step S1: Acquire the actual time delay value between the navigation parameter collection value, the positioning pulse and the telemetry pulse. Navigation parameters include heading, depth, roll, trim, etc. The actual delay value is determined according to the acquired navigation parameter collection value, specifically:
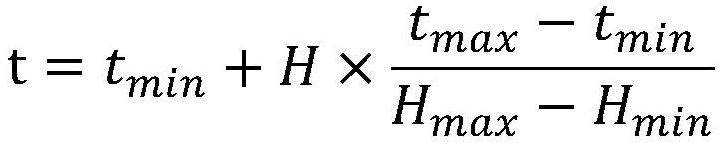
[0032] Obtain the collection value H of the navigation parameters, and the minimum delay value t between the positioning pulse and the telemetry pulse min and the maximum delay value t max , the minimum delay value t min Corresponding to the minimum sailing parameter value H min , the maximum delay value t max Corresponding to the maximum sailing parameter value H max ; Then the actual delay value t calculated by the actual solution is:
...
Embodiment 2
[0045]This application proposes a method for simultaneously realizing underwater acoustic positioning and navigation parameter telemetry for UUV, using a multi-element beam tracking method, using multi-array element omnidirectional ranging, and spatial diversity in a specified direction, which not only avoids echo interference in other directions, but also avoids echo interference in other directions. The signal reception gain is increased, thereby improving the positioning accuracy.
[0046] The application has been fully verified by underwater tests. The static and dynamic verification tests done in a lake are shown in Table 2 for positioning measurement error data, and for navigation parameter measurement error data as shown in Table 3.
[0047] Table 2 Positioning measurement error data
[0048]
[0049]
[0050] Table 3 Navigation parameter measurement error data
[0051]
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More