

Radar and communication integrated unmanned aerial vehicle cooperative multi-target detection method
A detection method and UAV technology, applied in wireless communication, radio wave measurement systems, measurement devices, etc., can solve problems such as limited and time-varying channel observation information, and achieve the effect of reducing load, solving resource shortage, and reducing weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
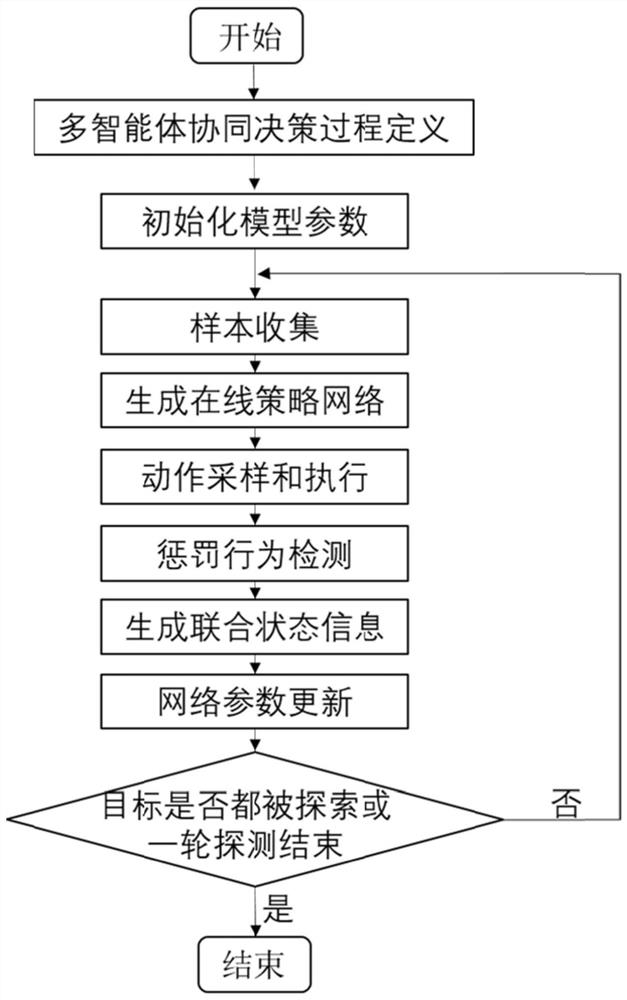
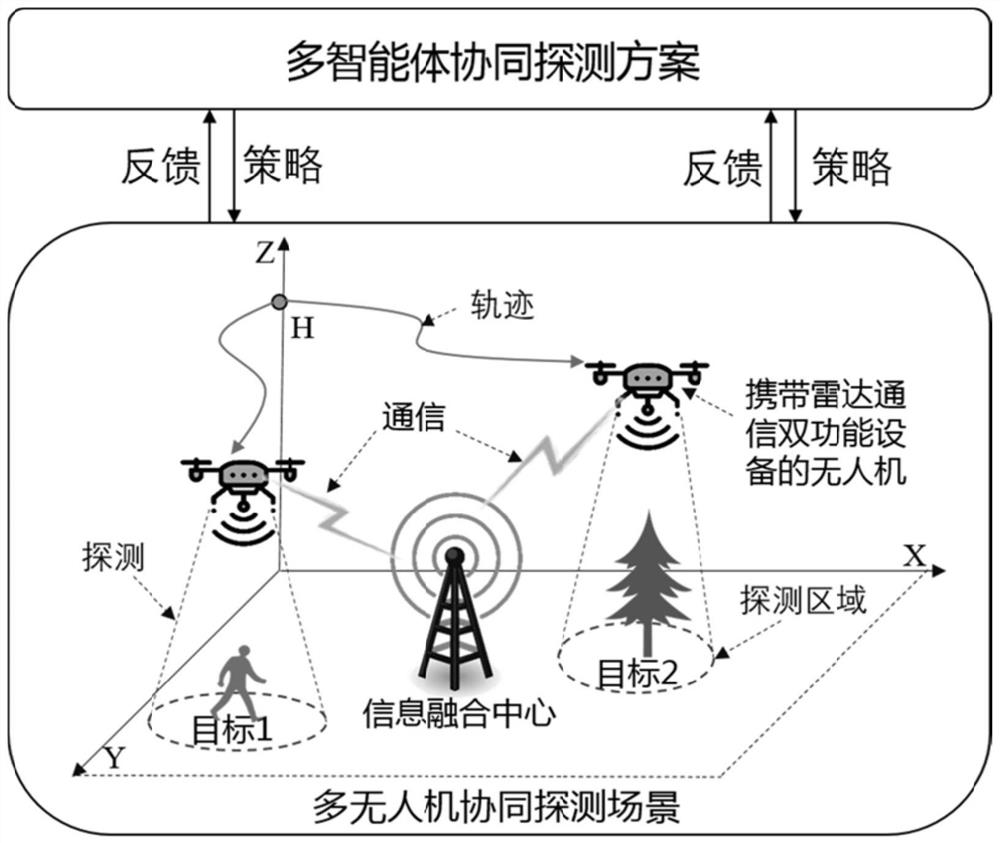
[0190] First, the detection range is delineated for the detection of the drone. Through the GPS positioning device equipped for each drone, each drone can obtain the coordinates of the current moment in real time. When the coordinates exceed the detection range at a certain moment, The learning behavior of the drone is adjusted by an algorithm, so that the drone avoids going out of bounds.
[0191] Then use the Markov model to define the collaborative process between multiple UAVs. Set the detectable range of the UAV as 2000m×2000m, the number M of UAVs as 10, the target to be detected as 100, the maximum time step T from the start of detection to the end of detection is 200, and each step lasts for The time is 5 minutes. In addition, it is necessary to set the longest distance and maximum angle for each UAV to fly within a time step. Here, the longest distance l is set to 20m, and the maximum angle θ is 360 degrees. Then each UAV first obtains environmental information, inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More