Recognition, positioning and grabbing device and method for object grabbing operation of robot
A technology for grabbing devices and robots, which is applied to record carriers, instruments, and manipulators used by machines, and can solve problems beyond the cost-effective range of service robots, high cost, and technical difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
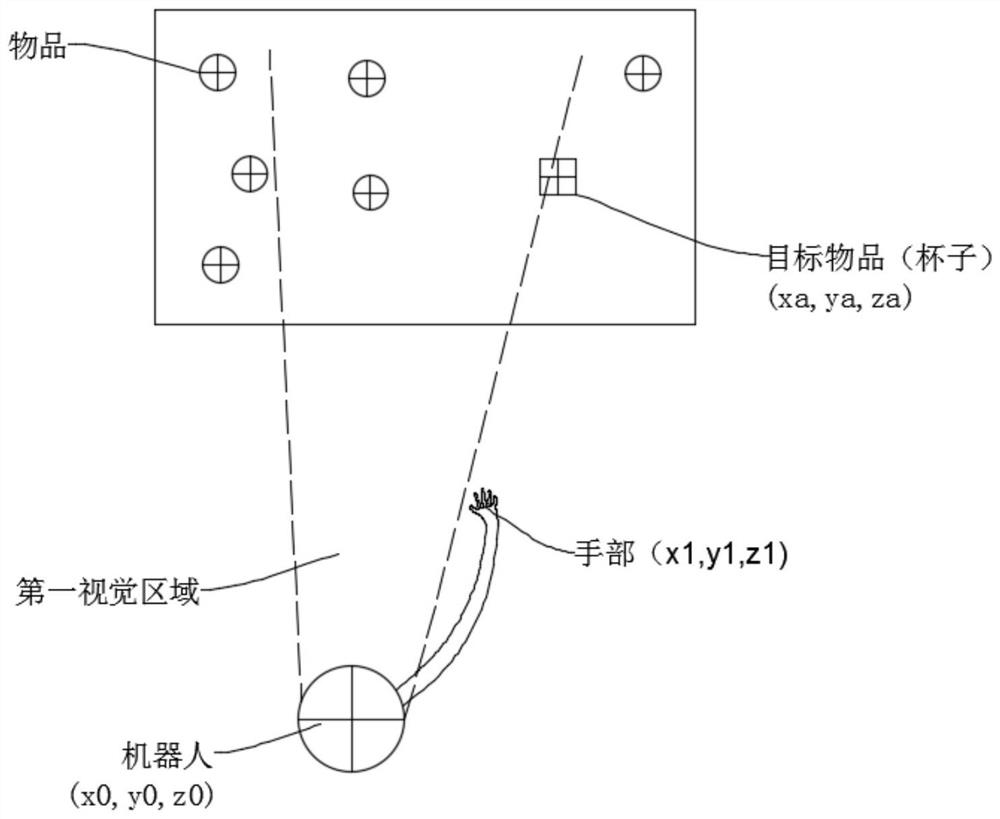
[0070] For the identification, positioning and grasping device for the operation of grasping objects by the robot, the robot mentioned in the present invention is a humanoid robot, which is used in the service industry, such as helping the elderly to hold cups at home and so on. Including the marks set on the items, wherein, each item is set with a mark, which is used as the target for the robot to grab, and the mark on the target item to be grabbed is the target mark, which is the target point of grabbing. Including the image sensor set on the robot head, the image sensor is used as a part of the vision system (described below), the image center of the image sensor is the visual origin, that is, the origin of the cross positioning line of the image, which is used for accurate positioning during visual inspection. to the target item. It includes a cross calibration mark set on the robot hand. In this embodiment, the calibration mark is set on the thumb of the hand. The calibra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com