

High-ground-clearance 4WID sprayer path tracking hierarchical control method considering sliding influence of driving wheel
A path tracking and layered control technology, which is applied to electric controllers, controllers with specific characteristics, combustion engines, etc., can solve the adverse effects of sprayer handling stability and path tracking control accuracy, and the reduction of tire longitudinal adhesion, etc. problem, to achieve the effect of improving the path tracking control accuracy, preventing tire idling, and reducing the turning radius
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0142] In order to more intuitively prove the advantages and gain effects of a path tracking layered control method for a high ground clearance 4WID sprayer considering the influence of the driving wheel slip of the present invention, it is discussed in detail in conjunction with a specific high ground clearance 4WID sprayer.
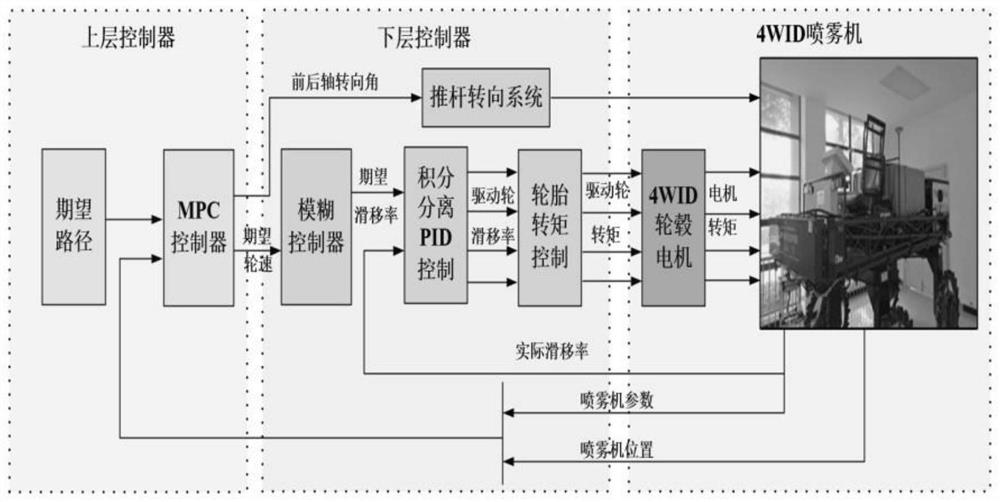
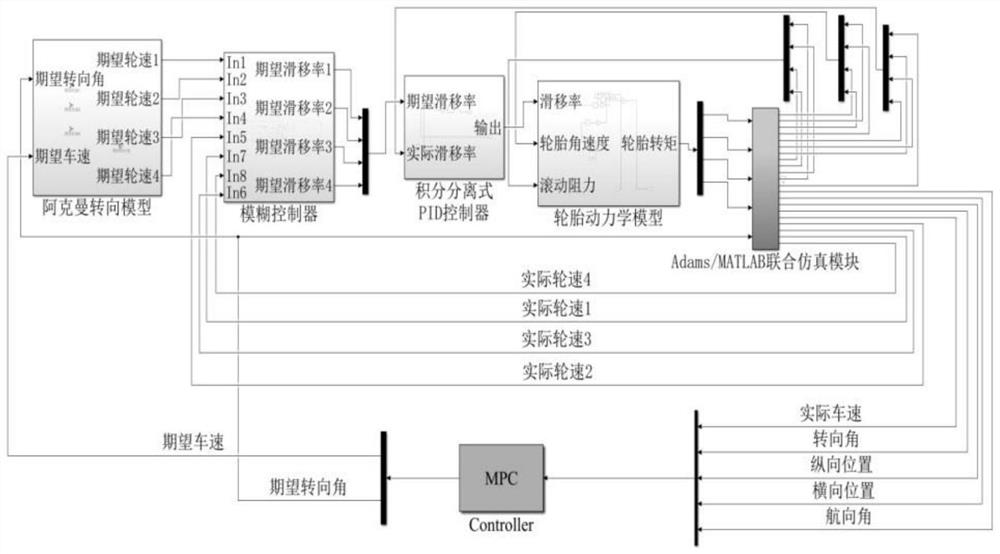
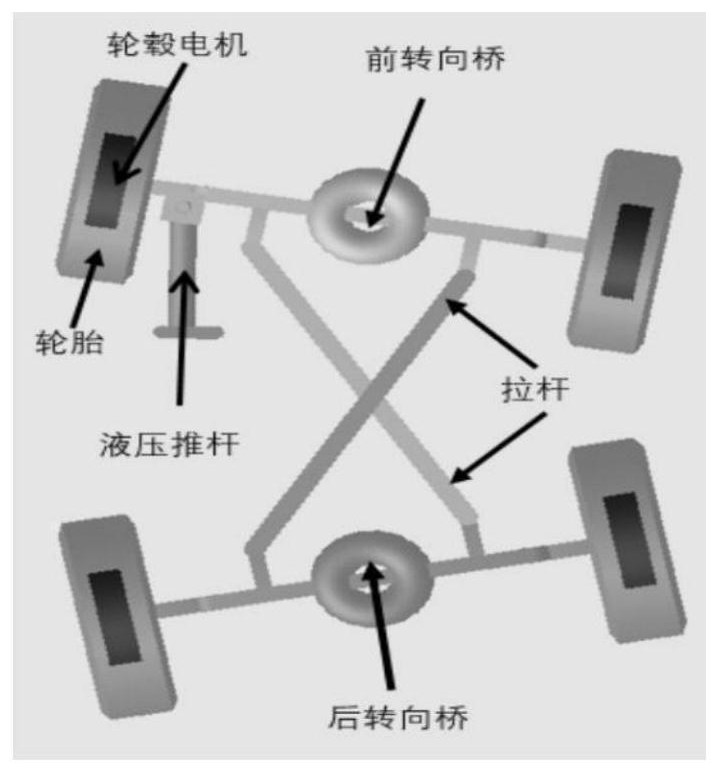
[0143] The present invention, a high ground clearance 4WID sprayer path tracking layered control method considering the influence of driving wheel slip, comprises the following steps:
[0144] Step 1, according to the special steering structure of the sprayer, establish the Ackerman steering model and the complete vehicle model of the sprayer; the specific performance of the Ackerman steering model is as follows:
[0145]
[0146] where V is the speed of the sprayer, V 1 ~V 4 is the speed of the four tires of the sprayer, W is the width of the body suspension, α and β are the steering angles of the front and rear wheels respectively, and a and b are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More