

Multi-dimensional cooperative control method and system for car-following of heterogeneous vehicle queue
A collaborative control, multi-dimensional technology, applied in the field of multi-vehicle platoon control of smart cars, can solve the problems of inconsistent braking response, different lateral stability of vehicles, affecting rear vehicle handling stability and comfort, etc. The algorithm has low requirements, excellent real-time performance and robustness, and the effect of alleviating traffic congestion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
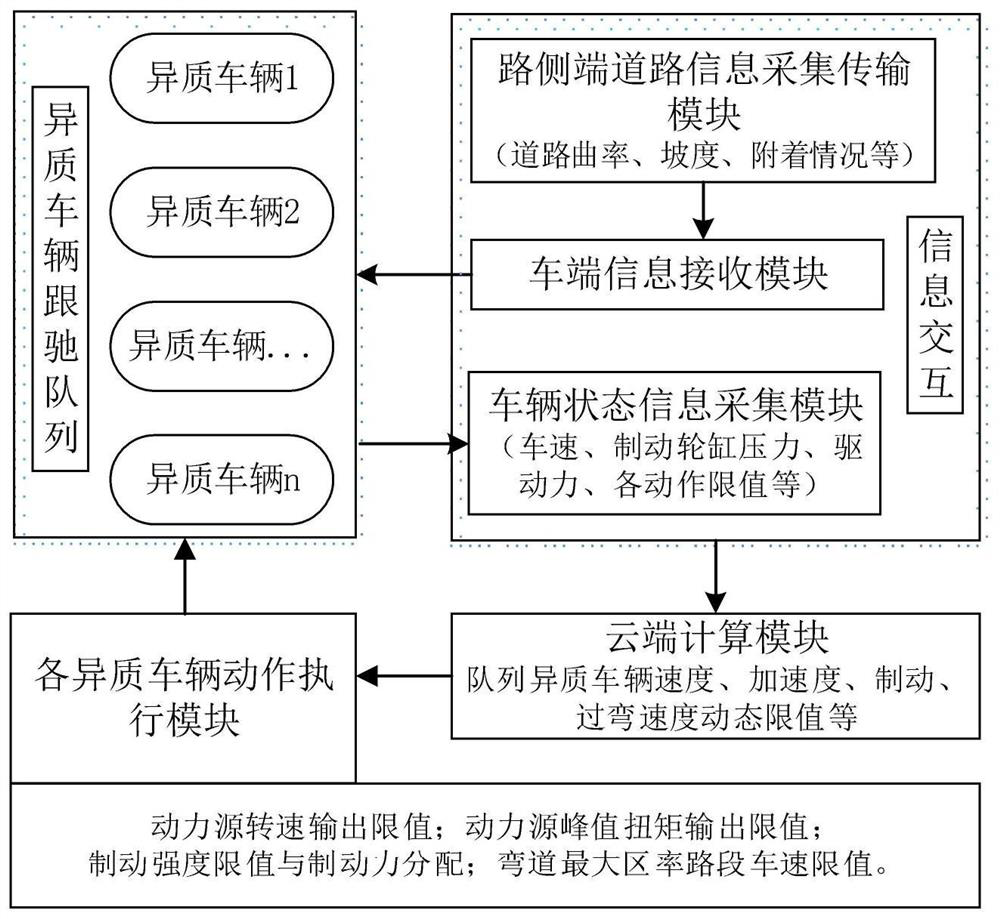
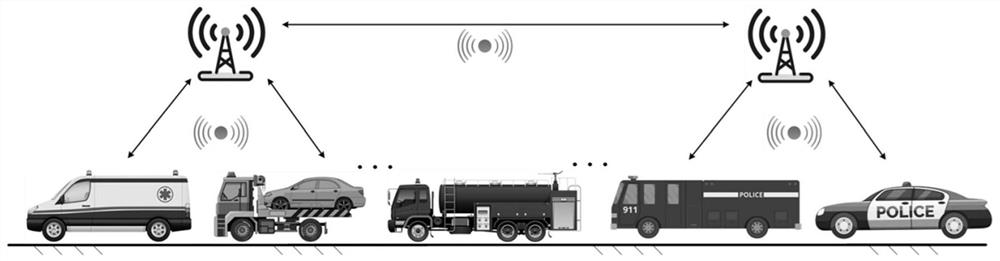
[0064] The present invention provides a multi-dimensional collaborative control method and system for heterogeneous vehicle following. In order to make the purpose, technical solutions and advantages of the present invention clearer, the present invention will be further described below with reference to the accompanying drawings and embodiments. , but the protection scope of the present invention is not limited to this. The invention is based on figure 1 The illustrated multi-dimensional collaborative control architecture diagram of heterogeneous vehicles platooning and following is implemented, and the schematic diagram of heterogeneous vehicles platooning and following is shown in figure 2 shown.
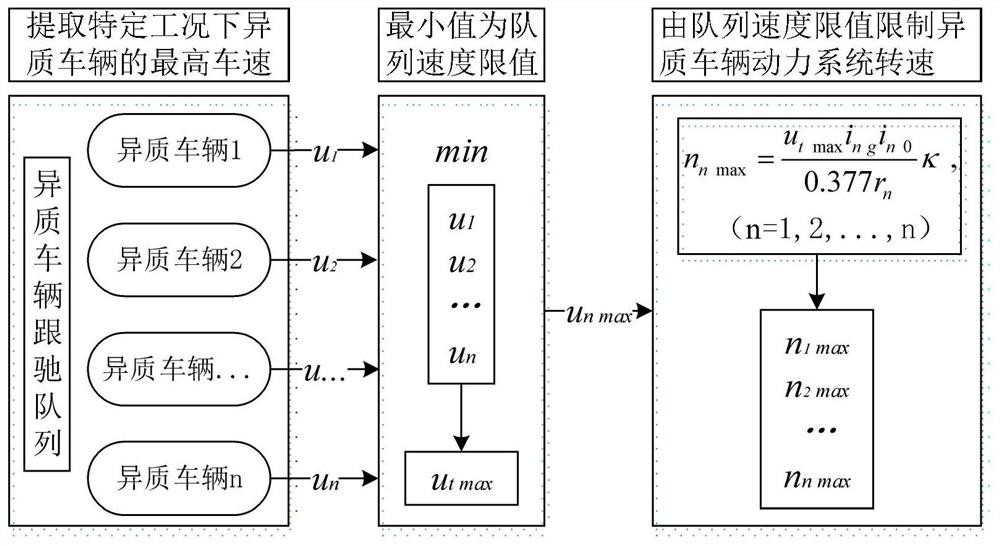
[0065] Step 1: Limit the maximum speed of the platooned vehicles according to the difference in power system performance. Due to the different powertrains of heterogeneous vehicles, the maximum speed of different vehicles is inconsistent. If the maximum speed of the preceding ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More