Combined navigation method and device based on double-laser Doppler velocimeter and inertial navigation system
A technology of Doppler velocimeter and inertial navigation system, applied in the field of integrated navigation based on dual laser Doppler velocimeter and inertial navigation system, can solve problems such as signal loss, affecting integrated navigation accuracy, heading angle error, etc., and achieve improvement Accuracy, wide range of speed measurement, and the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to make the purposes, technical solutions and advantages of the embodiments of the present invention more clearly understood, the following will clearly illustrate the spirit of the disclosed contents of the present invention with the accompanying drawings and detailed description. Afterwards, changes and modifications can be made by the technology taught by the content of the present invention, without departing from the spirit and scope of the content of the present invention. The exemplary embodiments of the present invention and their descriptions are used to explain the present invention, but are not intended to limit the present invention.
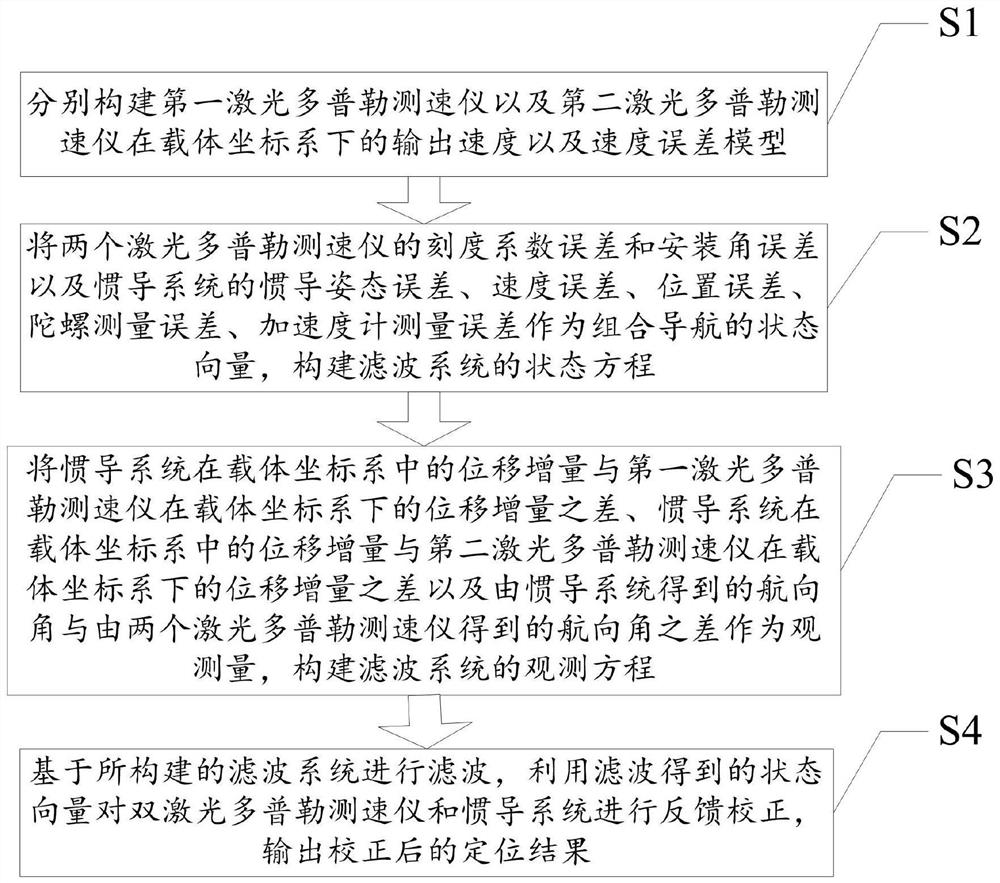
[0058] In one embodiment, refer to figure 1 , providing a combined navigation method based on a dual-laser Doppler velocimeter and an inertial navigation system, including:
[0059] (S1) respectively constructing the output velocity and velocity error model of the first laser Doppler velocimeter and the second laser ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More