

Cutter path control method applied to numerical control system
A tool path and control method technology, applied in the direction of digital control, electrical program control, etc., can solve the problems of reduced machining accuracy, low sampling rate, and unsmooth movement of the servo controller, so as to reduce busyness and improve performance and stability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described and described in detail below with reference to the specific embodiments and the accompanying drawings. Those of ordinary skill in the art will be able to implement the present invention based on these descriptions. In addition, the embodiments of the present invention referred to in the following description are generally only some embodiments of the present invention, not all of the embodiments. Therefore, based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative work shall fall within the protection scope of the present invention. Unless otherwise specified, the methods briefly described in the embodiments of the present invention are all methods mastered by those skilled in the art.
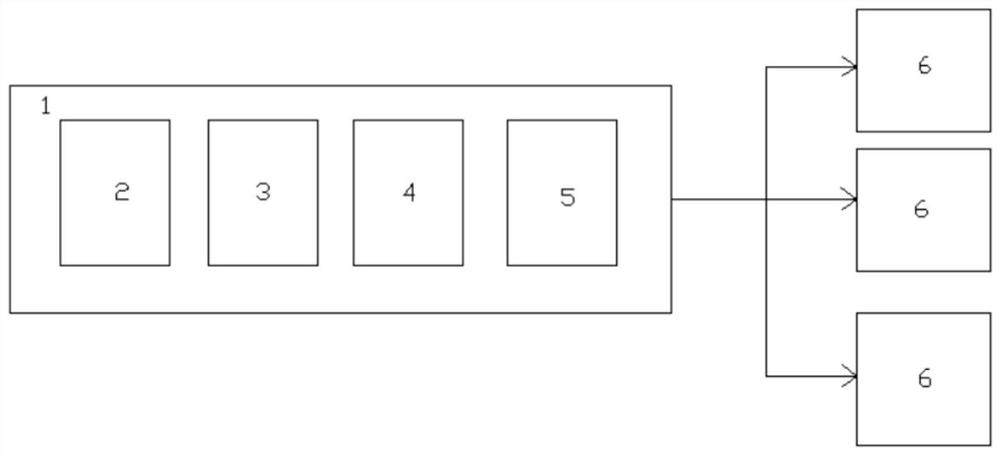
[0029] Attached below Figure 2-4 Further explanation for this application:
[0030] As one of the embodiments of the present invention, a tool path contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More