

Projection recovery type large-range sensing robot and sensing method
A robot and a wide range of technology, applied in the field of perception robots, can solve the problems of limited life, short flight time, etc., and achieve the effect of good reliability and long life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0032] The projectile recovery type large-scale perception robot of the present invention adopts the large-scale perception robot with repeated projecting and recovery methods, and can take pictures at local terrain during projectile motion. After stitching multiple pictures, it can complete large-scale Extraterrestrial table mapping. This method does not depend on the atmospheric environment, and the projected electric energy comes directly from the patrol device, which can be reused and is a flexible and large-scale sensing method.
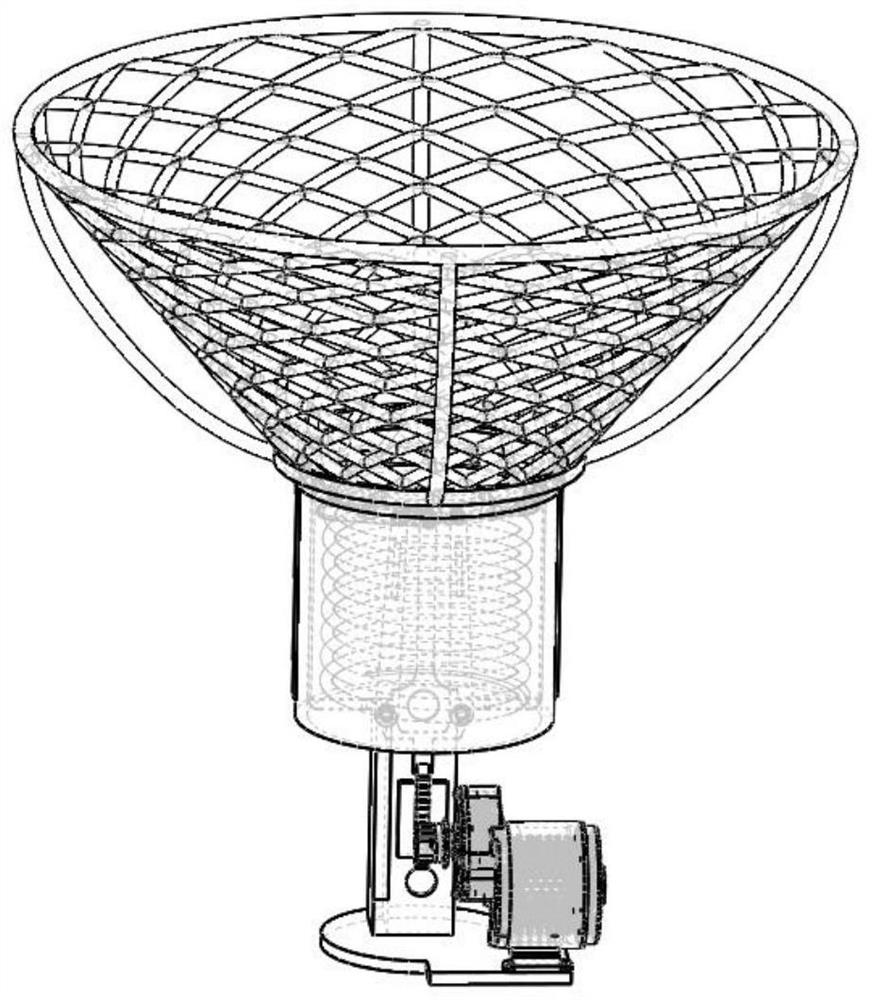
[0033] The ejection recovery type large-scale perception robot is installed on the extraterrestrial surface patrol and is divided into two parts: the mechanical ejection recovery module (such as figure 1 shown), the flight perception module; the flight perception module is placed in the mesh basket of the mechanical ejection recovery module.
[0034] There is a mesh basket on the top of the mechanical ejection recovery module, which is used to ...
Embodiment 2
[0052] An ejection recovery type large-scale perception robot, comprising a mechanical ejection recovery module and a flight perception module;
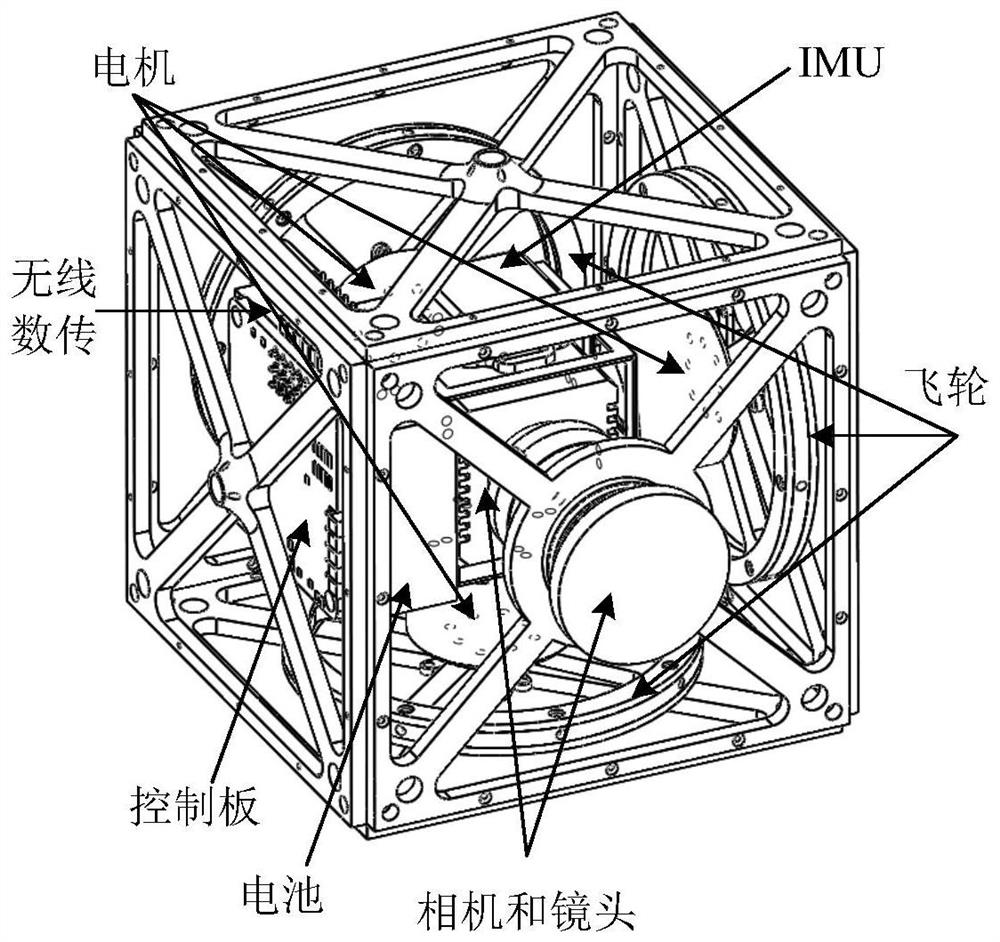
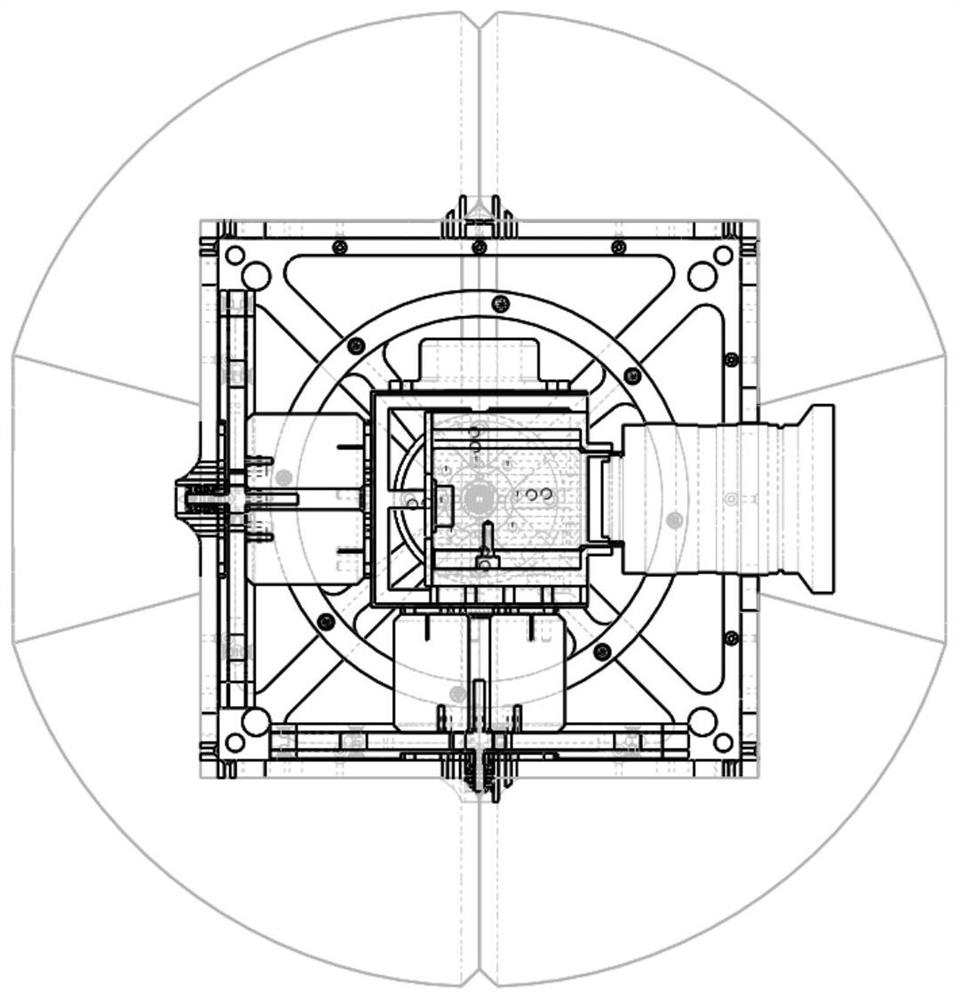
[0053] The mechanical ejection recovery module includes a mesh basket, a motor, a transmission mechanism, and a spring; the mesh basket is used to place and retrieve the flight perception module, the motor compresses the spring through the transmission mechanism, and the spring is used to eject the flight perception module in the mesh basket; the flight perception module includes damping Shell, control module, IMU, UWB positioning module, perception sensor, flywheel; the control module determines the real-time pose through the IMU, UWB positioning module measurement, and determines the speed of the flywheel according to the deviation between the real-time pose and the target attitude, and controls the flight perception The module tracks the three-axis attitude of the target; during the whole process of ejection of the flight perceptio...
Embodiment 3
[0060] An ejection recovery type large-scale perception robot, comprising a mechanical ejection recovery module and a flight perception module;
[0061] The mechanical ejection recovery module includes a mesh basket, a motor, a transmission mechanism, and a spring; the mesh basket is used to place and recover the flight perception module, the motor compresses the spring through the transmission mechanism, and the spring is used to eject the flight perception module in the mesh basket; the flight perception module is provided with The spherical shell made of damping material also includes a motion control system, a sensory sensor, and a positioning system. The motion control system is used to control its own posture and align the sensory sensor to the target area; the positioning system is used to determine the position of itself and the target area. Location; Perceptual sensors are used to image the target area at different heights.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More