

Active-disturbance-rejection and anti-swing control method for composite slip form of movable base bridge crane
A bridge crane, active disturbance rejection control technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the redundant control structure, affect the safety and work efficiency of the crane, and the most difficult observer parameters Optimal state and other issues, to achieve the effect of stable and rapid control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
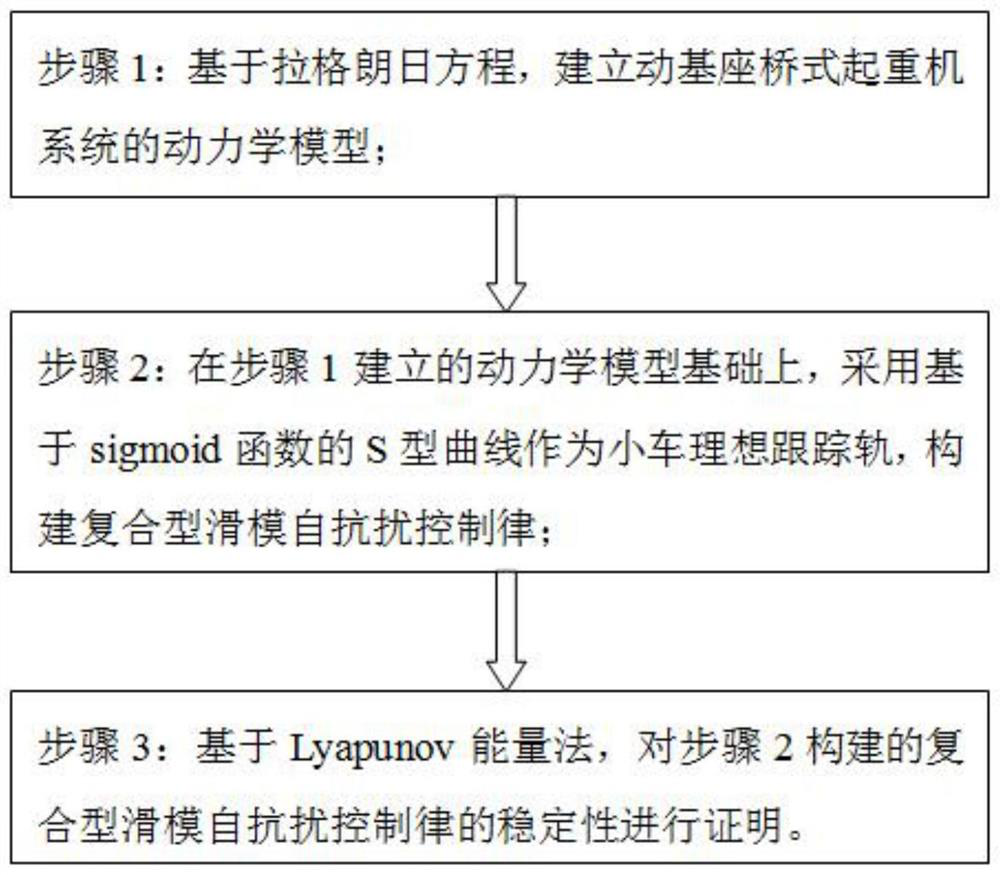
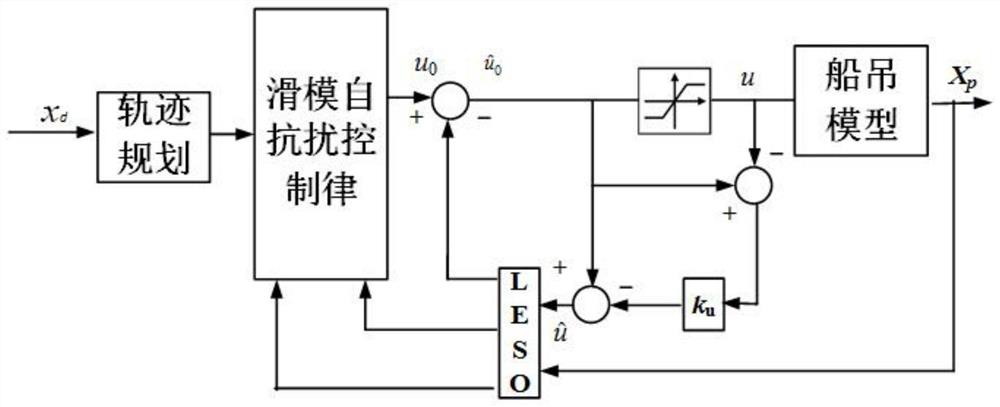
[0125] Refer to the attached Figure 1-9 As shown in the figure, a control method for a composite sliding mode active disturbance rejection and anti-swing of a moving-base bridge crane includes the following steps:
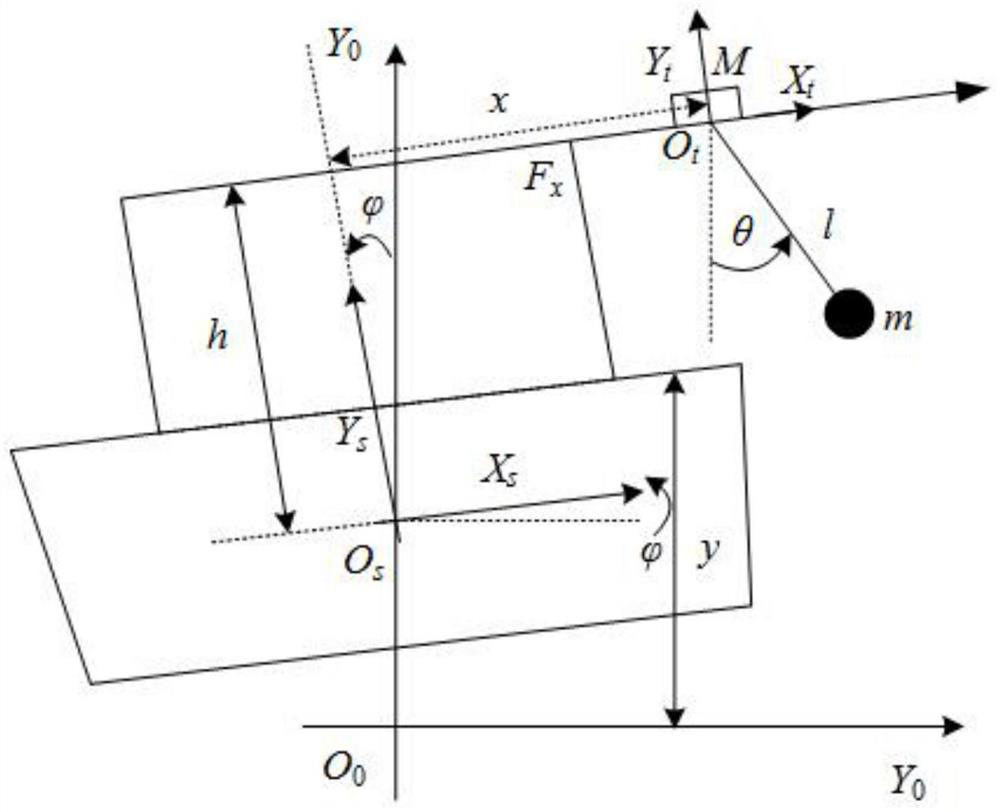
[0126] Step 1: The moving base bridge crane is a multivariable coupled nonlinear underactuated system. Various factors in the actual operation process will affect the work performance, such as the change of the running speed of the trolley, the change of the size and weight of the load, the interference of the wind, the change of the length of the wire rope, the heave and roll of the hull with the waves, etc. movement, friction between the trolley and the track, etc. Therefore, the dynamic model of the moving base bridge crane system with a certain accuracy should be established first.
[0127] The motion of the hull of the moving base bridge crane under the action of waves is very complicated, because the hull has six degrees of freedom of the base excitation m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More