Four-axis nanometer control system
A control system, nanotechnology, applied in the direction of general control system, control/regulation system, program control, etc., can solve the problems of large system interference, single static control, nanoscale precision motion process harmonic interference, etc., to reduce The amount of system interference, the realization of dynamic feedback, and the effect of avoiding harmonic interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The invention will be further described below with reference to the accompanying drawings and specific embodiments.
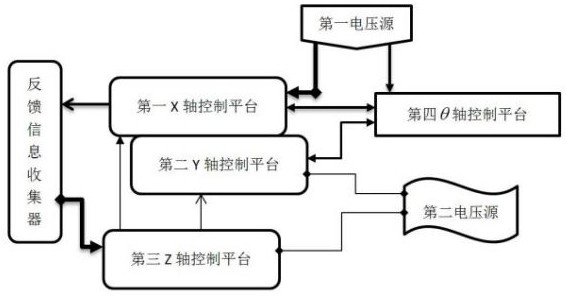
[0046] figure 1 It is a schematic diagram of the main structure of a four-axis nano-control system according to an embodiment of the present invention.
[0047] exist figure 1 , the four-axis nano-control system includes a four-axis motion control platform, and the four-axis motion control platform includes a first X-axis control platform, a second Y-axis control platform, a third Z-axis control platform, and a fourth θ-axis control platform platform.
[0048]Specifically, the first X-axis motion platform is used to control the acceleration and traction speed of the first target object in the X-axis direction;
[0049] The second Y-axis is mounted on the X-axis, and is used to adjust the distances between different multiple second target objects;
[0050] The third Z-axis control platform is used to control the movement of the third target object in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More