

Minitype multi-articulation electromagnetic and piezoelectric creeping motion robot system
A robot system and electromagnetic technology, applied in the direction of generator/motor, micro-manipulator, piezoelectric effect/electrostrictive or magnetostrictive motor, etc., can solve the problem of improvement, difficulty in power-to-weight ratio, difficulty in volume of electromagnetic drive, etc. low noise, reduced machining accuracy and assembly requirements, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
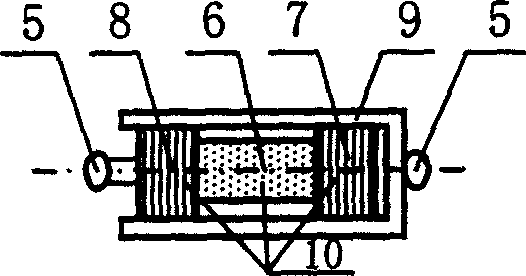
[0014] like figure 1 , figure 2 As shown, the present invention includes: a drive unit 1 , an elastic sealing membrane 2 , a front compartment 3 , a rear compartment 4 and a universal joint 5 . The joints between the drive units 1, the front cabin and the drive unit 1, and the rear cabin 4 and the drive unit 1 are connected by universal joints 5 and sealed with an elastic sealing film 2. The drive unit 1 is controlled by a piezoelectric body 6, electromagnet 7, electromagnet 8 and sleeve 9, and the two ends of the piezoelectric body 6 are fixedly bonded to the electromagnet 7 and the electromagnet 8 respectively to form the driver 10 of the driving unit 1. There is a small gap between the driver 10 and the sleeve 9, so that it can move back and forth in the sleeve 9, and the driver 10 of each drive unit 1 is connected with the sleeve 9 of the next drive unit 1 or the rear cabin 4 .
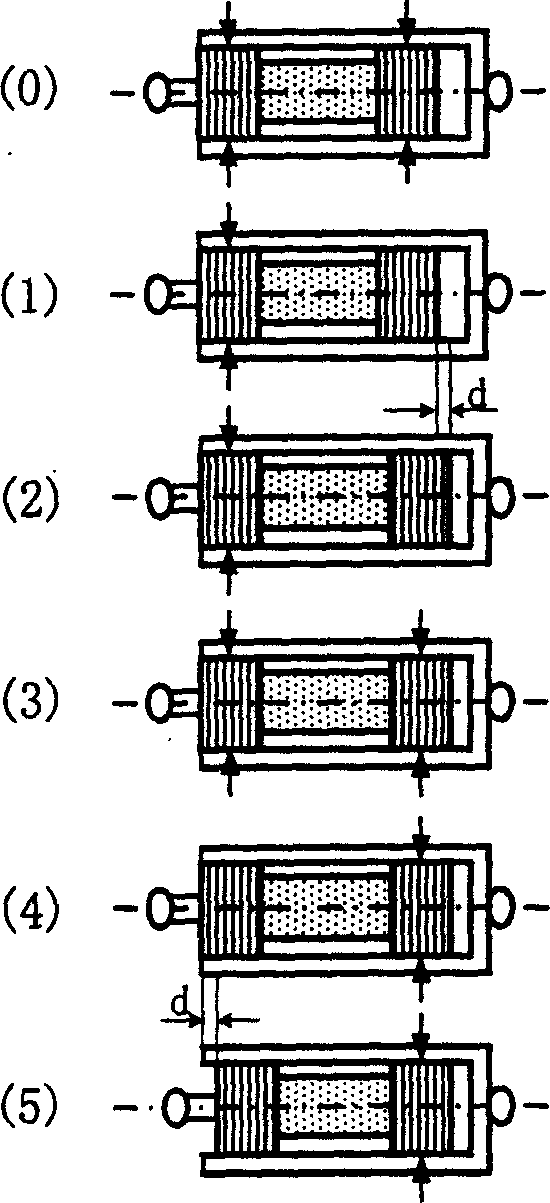
[0015] like image 3 As shown, the movement process of the driving unit is as follows: (0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More