

S face control method of flotation under water robot motion
A technology of robot motion and control method, applied in the direction of manipulators, manufacturing tools, etc., to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0059] The S-plane control method for the motion of the floating underwater robot provided by the invention is applied to the WXX-I underwater robot developed by the Marine Comprehensive Technology Research Center of Harbin Engineering University. The robot is developed to explore the miniaturization and clustering of intelligent underwater robots. Its B / L is large, and the gyration is good, but the navigation stability is poor, and the precise motion control is difficult.
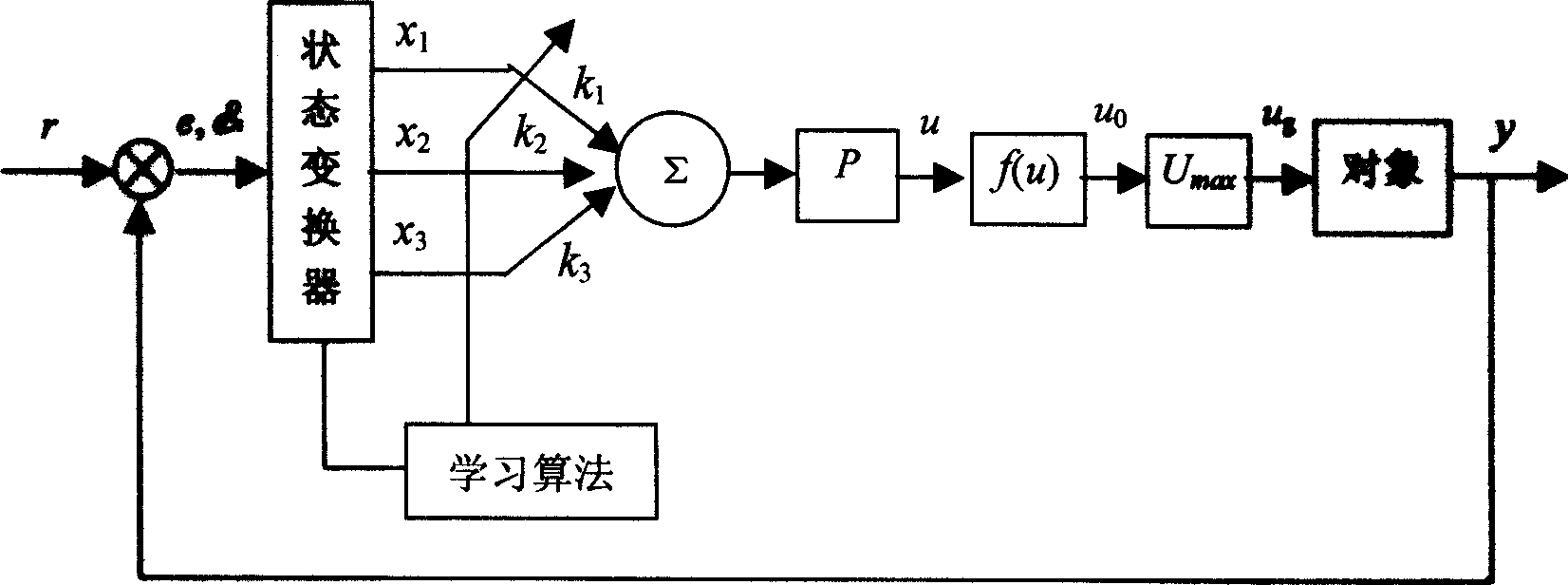
[0060] The process of control flow is: the short baseline system provides the current x and y values in the geodetic coordinate system, the depth gauge provides the z value, and the magnetic compass provides the current attitude angle (heading angle, pitch angle, roll angle) information. The planning system (part of the software) determines the x, y, z, heading, pitch, and roll angles of the target pose. In this way, the control deviation of six degrees of freedom is obtained, and the deviation change l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More