

Multi-axis robot provided with a control system
A multi-axis robot and control system technology, applied in general control systems, control/regulation systems, program-controlled manipulators, etc., can solve complex problems, long working hours, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
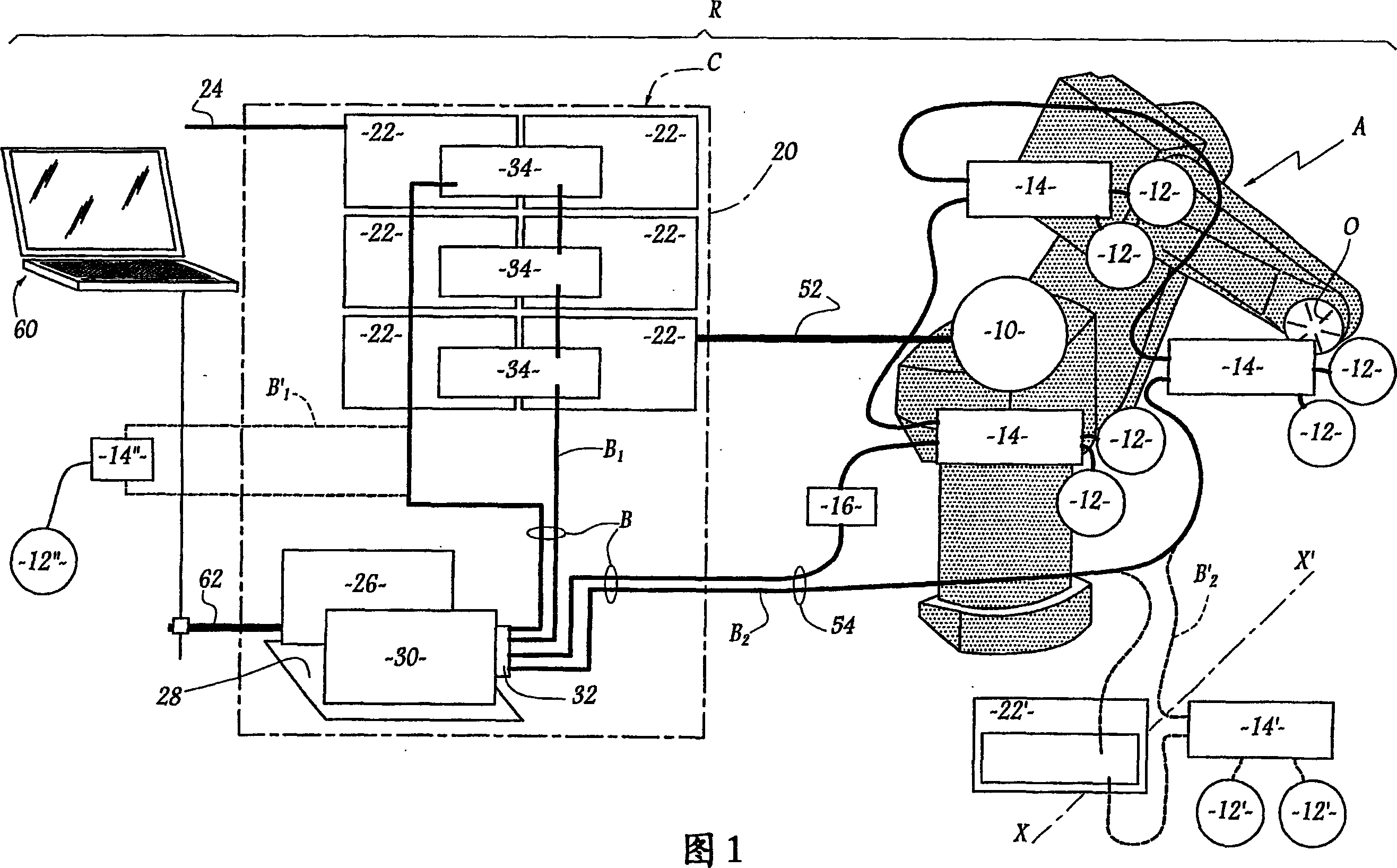
[0017] Through the following description of the embodiment of the multi-axis robot and its control system according to the invention, people can better understand the present invention and have a clearer understanding of other advantages. This embodiment is only given by way of example with reference to the accompanying drawings , where the simple graph is a theoretical rough representation of the associated control system and multi-axis robot.
[0018] The robot arm A of the robot R shown in the figure is arranged along the conveying path shown in the direction X-X'. The robotic arm is equipped with six motors, each of which moves the moving part of the robotic arm about one of the six axes of the robotic arm to move the tool O to a designated position. These electric motors are represented in the figure as mechanization 10 . In fact, they are distributed in the robot arm A. Distributed throughout the robot R are six analog position sensors or encoders 12 for measuring the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More