

Verification system for fast autonomous deep-space optical navigation control prototype
A technology for optical navigation and prototype verification, applied in the field of analog systems, can solve the problems of high cost of the device, high labor cost, complex system, etc., and achieve the effects of convenient operation, low cost and simple system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
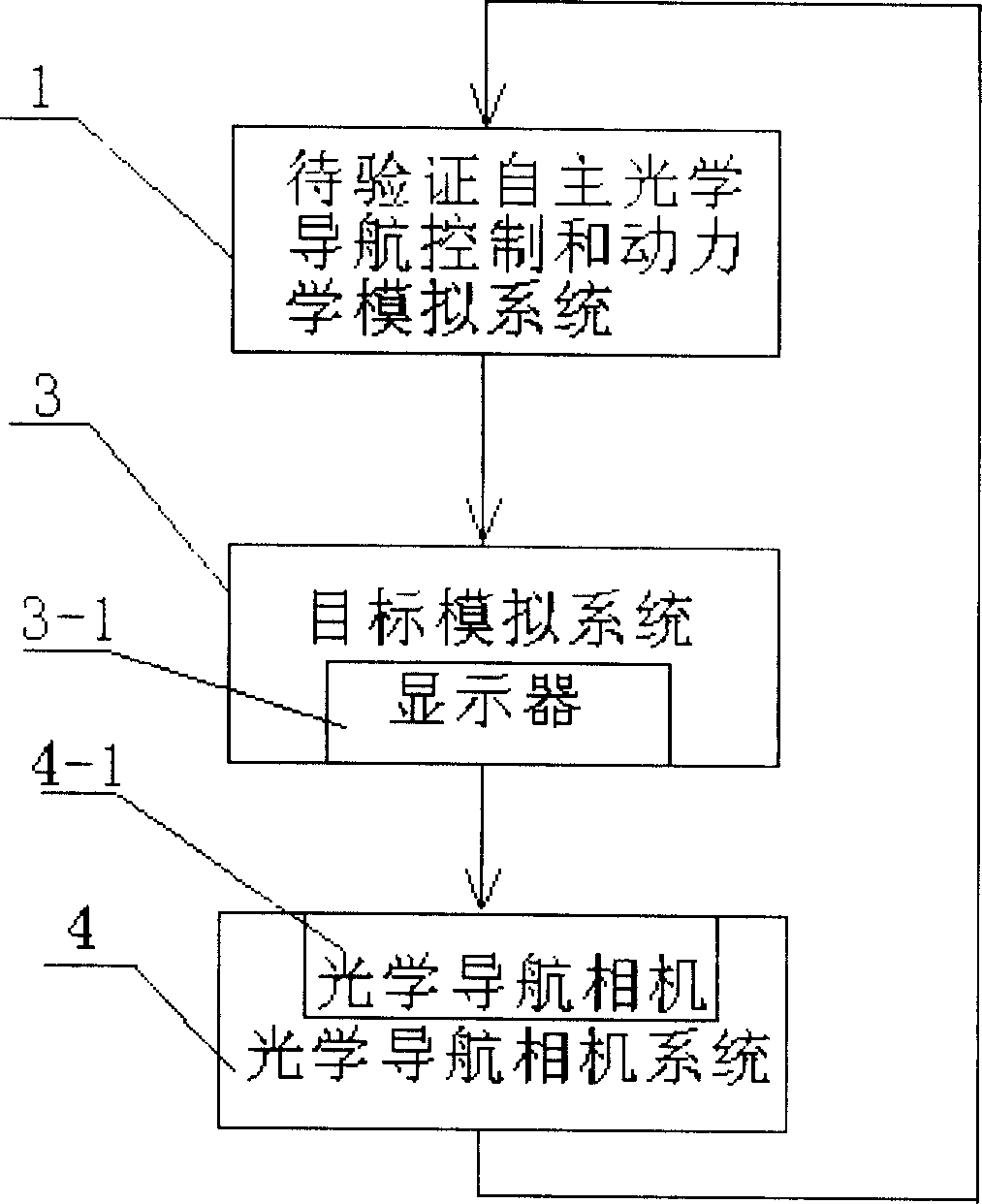
[0014] Combine below figure 1 This embodiment will be specifically described. It consists of the autonomous optical navigation control and dynamics simulation system 1 to be verified, so as to realize the navigation information and control instructions of the deep space probe for the selected landing star and landing area and complete the simulation of the dynamics of the deep space probe;
[0015] The target simulation system 3 is used to generate the three-dimensional virtual environment faced by the deep space detector based on the detector information generated by the dynamic simulation, and displays it through the display 3-1; and the optical navigation camera system 4 is used to realize the optical navigation The navigation camera 4-1 captures the image displayed on the display 3-1, and uses the image to drive the autonomous optical navigation control and dynamics simulation system 1 to be verified to generate the navigation information and control instructions for the n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More